![]() UM2958 ステバル-FCU001V2
UM2958 ステバル-FCU001V2
フライトコントローラユニット評価ボード
ユーザーマニュアル
ミニドローン用フライトコントローラユニット評価ボード STEVAL-FCU001V2 を使い始める
導入
の ステバル-FCU001V2 評価ボードは、クワッドコプター用のフライト コントローラー ユニット (FCU) ソリューションを開発するためのシンプルなプラットフォームとして設計されています。
完全なsampleファームウェアプロジェクト(STSW-FCU001) を使用すると、DC モーター (30 つの 9 V-XNUMX A オンボード MOSFET のおかげで) を搭載した小型または中型のクワッドコプター、および外部 ESC (つまり、 ステヴァル 品番 or ステバル-ESC002V1).
BLE 接続 (スマートフォンまたはタブレットを使用) または PWM 入力ポートに接続された RF 受信モジュールを介してボードを制御できます。
このシステムには、高性能Arm® Cortex®-M4マイクロコントローラユニット(STM32F401CCU6)、iNEMO慣性モジュール(LSM6DSR)、Bluetooth® 低エネルギーモジュール(ブルーNRG-M0A)、バッテリーの急速充電を可能にする電源管理回路(STC4054)、および4 言語 クワッドコプターのモーターを駆動するための N チャネル 30 V、9 A、PowerFLAT(TM) STripFET(TM) V パワー MOSFET。
追加の気圧センサー(型番)は高度の推定値を提供します。
このリファレンスデザインは、STM100で利用可能な32DMIPS以上と、ボードの拡張性により、高度な自動ナビゲーションアルゴリズムの開発に使用できます。 テセオ-LIV3F GNSSモジュールまたは飛行時間型センサーのセットに VL53L5CX.
このシステムは、欧州認証、FCC 認証、IC 認証 (FCC ID: S9NBNRGM0AL、IC: 8976C-BNRGM0AL) の RF テストに合格しました。
知らせ: 専用のサポートが必要な場合は、オンラインサポートポータルからリクエストを送信してください。 サポート.
はじめる
1.1ボードオーバーview
の ステバル-FCU001V2 評価ボードの機能:
- コンパクトなフライトコントローラユニット(FCU)評価ボードには、amp小型または中型のクワッドコプター用ファームウェア
- オンボードLiPo 1セルバッテリー充電器
- 低電圧で4つのDCブラシ付きモーターを直接駆動可能tagオンボードMOSFETまたはDCブラシレスモーター構成用の外部ESCを使用する
1.2 パッケージ内容
の ステバル-FCU001V2 評価ボードパッケージの内容:
- 評価ボード自体
- ST-LINKアダプタとプログラミングケーブルを使用して、 ST-リンク/V2 or STLINK-V3SET

1.3 システム要件
ボードを使用するには、次のシステム仕様が必要です。
- STM7ソフトウェア開発ツールがプリインストールされたWindows PC(8、8.1、10、11、32)(STM32キューブIDE)
- ST-リンク/V2 (または STLINK/V3SET) インサーキットデバッガ/プログラマ、そのUSBドライバ(STSW-LINK009)および、オプションで、 STM32Cubeプログラマー ファームウェアのダウンロード
- スタンドアロン動作のためにバッテリーコネクタ(BT1)に接続するLiPo XNUMXセルバッテリー、またはUSBタイプAからMicro-USBオスケーブルを使用して接続します。 ステバル-FCU001V2 電源供給用のPCへの評価ボード
- ボードに直接接続された3.7V動作に適したXNUMXつのDCモーター、またはXNUMXつの対応する電子速度コントローラ( ステバル-ESC001V1 or ステバル-ESC002V1 評価ボード
- 選択したモーターに適した4つのプロペラ
- ST_BLE_ドローン AndroidとiOS用のアプリは、 STSW-FCU001 デモファームウェア
注記: クワッドコプターのサイズと重量に基づいて、プロペラ、モーター、電子速度コントローラー (ESC) を選択します。
ハードウェアの説明
の ステバル-FCU001V2 主なコンポーネントは次のとおりです。
- 言語 30 V、9 A、STripFETTM V テクノロジーを PowerFLATTM 3×3.3 パッケージに搭載
- STM32F401CCU6 UFQFPN4 パッケージに 256 KB のフラッシュ メモリと 64 KB の RAM を搭載した高性能 Arm® Cortex®-M48 MCU
- 型番 高性能 MEMS ナノ圧力センサー: 260~1260 hPa 絶対デジタル出力気圧計
- LSM6DSR iNEMO 慣性モジュール: 3D 加速度計と 3D ジャイロスコープ
- ブルーNRG-M0A Bluetooth® low energy 2 向け超低消費電力ネットワーク プロセッサ モジュール
- LD39015 低静止容量tageレギュレーター
- STC4054 USBから直接800mAのリチウムイオンおよびリチウムポリマーバッテリーを充電
- USBULC6-2M6 超広帯域ESD保護

2.1 ハードウェアアーキテクチャview
システム全体は 5 つの異なるサブシステムに分割できます。
- マイクロコントローラ
- センサー
- 接続性
- バッテリー管理
- DCモータードライバー
センサーと ブルーNRG-M0A デバイスは、2 つの個別の SPI 周辺機器を介してマイクロコントローラに接続されます。 2.2 ボードコネクタ
2.2 ボードコネクタ
の ステバル-FCU001V2 評価ボードにはいくつかのハードウェアコネクタが含まれています(図5を参照)。
- USBマイクロBメスプラグ
- バッテリー2ピンヘッダーコネクタ
- 4つのモーター2ピンヘッダーコネクタ
- UART 4ピンヘッダーコネクタ
- I²C 4ピンヘッダーコネクタ
- PWM入力6ピンヘッダーコネクタ
- マイクロSWDコネクタ(1.27mmピッチ)
図 3 に示すように、これらのコネクタの一部では、ユーザーに最大限の自由を与えるために、ピンがボード上にはんだ付けされていません。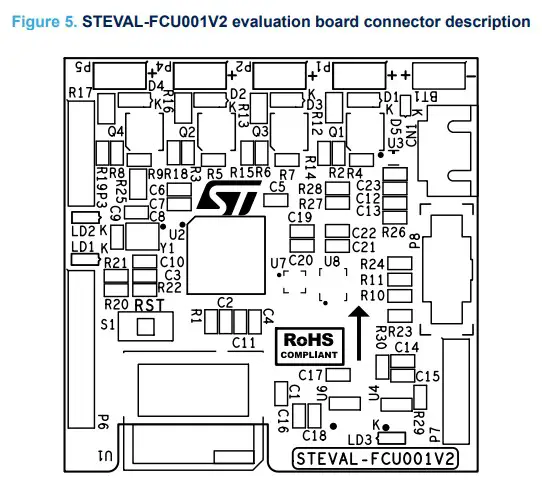 ボードは、USB コネクタまたは 1 セル バッテリーから電源を供給できます。両方を接続すると、内蔵バッテリー チャージャーが USB 電流を使用してバッテリーを充電します。
ボードは、USB コネクタまたは 1 セル バッテリーから電源を供給できます。両方を接続すると、内蔵バッテリー チャージャーが USB 電流を使用してバッテリーを充電します。
特定の用途を考慮すると、最大放電電流定格値の高いLiPoバッテリーを使用することを強くお勧めします(このパラメータは「Cの数」で示されることが多く、「C」はバッテリー容量です)。したがって、放電定格が500Cの50mAhバッテリーの最大持続負荷は25です。 amps: この値を、モーターによって吸収される電流の合計 (x4) と、モーターに関しては無視できるオンボード電子機器によって吸収される電流の合計と比較します。
表1. バッテリー2ピンヘッダーコネクタ(BT1)
| ピン | 信号 | 説明 |
| + | VBAT+ | 3.4セルLiPoバッテリー(4.2~XNUMXV) |
| – | グランド | – |
注記: + はボードの左側に配置されています (ボードの向きについては図 3 を参照)。逆バッテリー保護が実装されていないため、正しい極性接続を確実にすることが重要です。
3.7 つのモーター コネクタを使用して、XNUMX セル XNUMX V モーターを各コネクタまたは外部 ESC に接続できます。
モーターの種類に応じて、オスのストリップ ラインをボード上またはモーターのピンに直接はんだ付けする必要があります。
では STSW-FCU001、Pxコネクタとドローン構造上のモーター配置との関連性が検討されている(詳細については、UM2512を参照)。 詳しくはこちら).
表2. モーター2ピンヘッダーコネクタ(P1、P2、P4、P5)
| ピン | 信号 | 説明 |
| 1 | VBAT+ | DCモーターの場合はモーター(+)に接続します(1) |
| 2 | モーター- | DCモーターの場合はモーター(-)に接続します(1) |
- 外部 ESC には接続されていません。
- 外部 ESC の PWM 入力に接続します。
注記: + はボードの右側に配置されます (ボードの向きについては図 3 を参照)。
注記: モーターのデータシートを参照して、+ 線と – 線の色を区別することができます。
多くの商用フライトコントローラーと同様に、 ステバル-FCU001V2 外部周辺機器を接続するための UART と I²C をホストします。
表3. UART 4ピンヘッダーコネクタ(P7)
| ピン | 信号 | 説明 |
| 1 | 電圧 | STM3.3の32V |
| 2 | グランド | |
| 3 | USART1_RX | STM32 用 RXD |
| 4 | USART1_TX | STM32 用 TXD |
注記: ピン 1 はボードの上側に配置されます (ボードの向きについては図 3 を参照)。
表4. I2C 4ピンヘッダーコネクタ(P3)
| ピン | 信号 | 説明 |
| 1 | 電圧 | STM3.3の32V |
| 2 | I2C2_SDA | – |
| 3 | I2C2_SCL | – |
| 4 | グランド | – |
注記: ピン 1 はボードの上側に配置されます (ボードの向きについては図 3 を参照)。
の STSW-FCU001 評価ソフトウェアは、スマートフォンアプリを介してドローンを制御する可能性を提供するように設計されている(ST_BLE_ドローン) および外部リモートコントローラーによって制御されます。
この場合、リモートコントローラRXモジュールをP6コネクタに接続する必要があります。 ステバル-FCU001V2 評価ボード。
ファームウェアの実装は、パルス周期変調 (PPM) 受信機と互換性があります。
- CH1はロール機能付きAIL制御に関係する
- CH2はピッチ機能付きELE制御に関連します
- CH3は推力機能を備えたTHR制御に関連している
- CH4はヨー機能付きRUD制御に関係する
表5. PWM入力6ピンヘッダーコネクタ(PXNUMX)
| ピン | 信号 | 説明 |
| 1 | VBAT+ | バッテリーに直接接続(+) |
| 2 | TIM2_CH1 | TIM2_CH1(RF RX PWM IN信号CH1用) |
| 3 | TIM2_CH2 | TIM2_CH2(RF RX PWM IN信号CH2用) |
| 4 | TIM2_CH3 | TIM2_CH3(RF RX PWM IN信号CH3用) |
| 5 | TIM2_CH4 | TIM2_CH4(RF RX PWM IN信号CH4用) |
| 6 | グランド | – |
注記: ピン 1 はボードの上側に配置されます (ボードの向きについては図 3 を参照)。
表6. マイクロSWDコネクタのデバッグ(P8)
| ピン | 信号 | 説明 |
| 1 | 電圧 |
| ピン | 信号 | 説明 |
| 2 | スワップ | SWDデバッグデータライン |
| 3 | グランド | |
| 4 | スワップクロック | SWDデバッグクロックライン |
| 5 | グランド | – |
| 6 | ノースカロライナ | – |
| 7 | グランド | – |
| 8 | ノースカロライナ | – |
| 9 | グランド | – |
| 10 | NRST | STM32 の NReset |
デバッグの詳細については、セクション 2.3 を参照してください。
注記: ピン 1 はボードの右下側に配置されます (ボードの向きについては図 3 を参照)。
2.3 ST-LINK接続
ファームウェアを更新するには、 ST-リンク/V2 or ST-LINK/V3SET デバッガプログラマーにアダプタとケーブル(付属)を接続することで ステバル-FCU001V2 パッケージに記載されている通り セクション1.2) をボードに接続し、次にラップトップに接続します。
注記: ST-リンク/V2 そして STLINK/V3SET パッケージには含まれていません。 詳しくはこちら 注文します。
システムセットアップガイド
ボードにはファームウェアがプリインストールされています STSW-FCU001ファームウェアは以下からも取得できます。 詳しくはこちら オープンソースコードとして、 ST BLEドローン アプリの機能を活用する。
3.1 プリインストールされたファームウェアでボードを使用する方法
ステップ1。 LiPo 1セルバッテリーをBTXNUMXバッテリーコネクタに接続します。 ステバル-FCU001V2極性に注意しながら、図のように 下に。 注意: 回路上の逆接続に対する保護はありません。
注意: 回路上の逆接続に対する保護はありません。
ステップ2. スマートフォンのBluetooth®接続を有効にし、 ST_BLE_ドローン 使用するにはアプリが必要です。
ステップ3.開く ST_BLE_ドローン スマートフォンでアプリを起動し、[探索を開始]をタップします。 ステップ 4. リストから DRN2100 デバイスを選択し、スマートフォンをボードに接続します。
ステップ 4. リストから DRN2100 デバイスを選択し、スマートフォンをボードに接続します。
LD2 がオンになり、接続がアクティブであることを示します。 リモコンが画面に表示されます。
リモコンが画面に表示されます。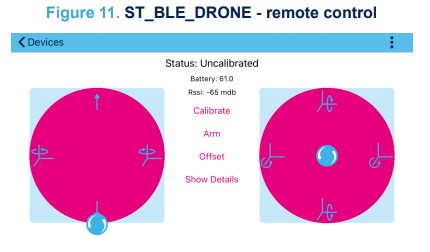
アプリは、Bluetooth 低エネルギー接続のバッテリー値と RSSI を表示します。
注記: 問題を回避するために、複数の ステバル-FCU001V2 オペレーティング スペースに評価ボードがある場合は、問題を回避するために、別の名前が表示されるように再プログラムする必要があります。
ステップ5. [詳細を表示]をタップすると、MEMSモーションセンサーのデータが画面に表示されます。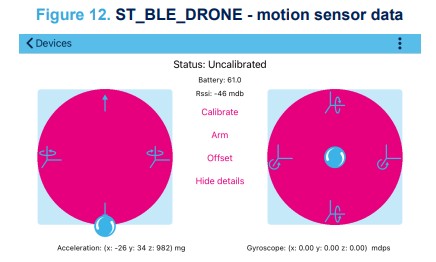
評価ボードを動かすことで、データがどのように変化するかを確認できます。
の STSW-FCU001 ファームウェアはキャリブレーションとアーミング手順も実装します。 ST_BLE_ドローン アプリはこれらの機能をリモートで実行することを許可します。
ステップ 6. 評価ボードを平面に置き、[Calibrate] をタップしてセンサーのオフセットを除去します。
アプリに「キャリブレーション済み」ステータスが表示され、LED LD1 がオンになります。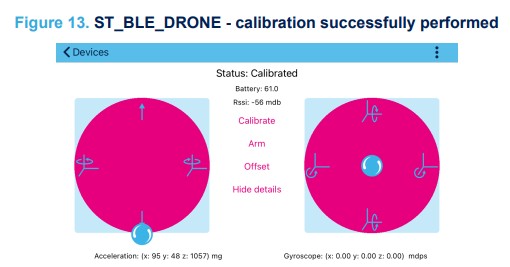 ステップ 7. 飛行を許可するには、武装手順に関連するボタンをタップします。
ステップ 7. 飛行を許可するには、武装手順に関連するボタンをタップします。
ステータス メッセージが「Armed」に変わり、LD2 がオンになります。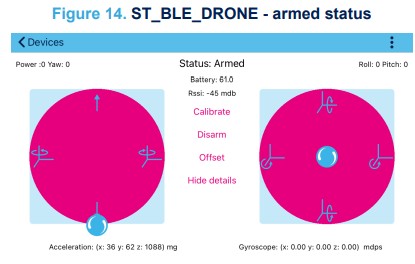 ステップ8. スマートフォンの左レバーを上下に動かします。
ステップ8. スマートフォンの左レバーを上下に動かします。
巻tagM1、M2、M3、M4 の e はドローンの飛行ルールに応じて変わります。
3.2 独自のファームウェアでボードを使用する方法
ステップ1. LiPo 1セルバッテリーをBTXNUMXバッテリーコネクタに接続します。 ステバル-FCU001V2極性に注意しながら、図のように 下に。 注意: 回路上の逆接続に対する保護はありません。
注意: 回路上の逆接続に対する保護はありません。
ステップ2。パッケージに含まれるST-LINKアダプターを ST-リンク/V2 (または STLINK/V3SET)と ステバル-FCU001V2 評価ボード。
ステップ3。USB ケーブルを PC とマイクロ USB コネクタ (CN1) に接続してボードに電力を供給します。
ステップ4。LD3がオンになっていることを確認してください。
ステップ5。 オプションで、 STSW-FCU001 ファームウェア パッケージ。
ステップ6。 ボードをプログラムする( UM2329).
注記: 電源の問題を回避するために、プログラミングフェーズ中に USB ケーブルを接続することをお勧めします。
ファームウェアの微調整セッションが終了したら、マイクロ USB ケーブルと ST-LINK アダプターへの接続を削除できます。
概略図




部品表
表7. 部品表
| アイテム | 数量 | 参照 | パーツ/値 | 説明 | メーカー | 注文コード |
| 1 | 1 | BT1 | バッテリーコネクタ、siptm2002 | ストリップライン オス 1X2 ピッチ 2.54 mm 90 度 | アダムテック | PH1RA-02-UA |
| 2 | 1 | CN1 | Micro_USB 2.0 メス SMt、microusb7025481 | マイクロUSBコネクタ | モレックス | 47590-0001 |
| 3 | 6 | C1,C7,C14, C17,C19,C2 1 | 1uF、smc0402、16V、+/-10% | セラミックコンデンサ XR7 | どれでも | どれでも |
| 4 | 12 | C2,C3,C4,C 5,C6,C10,C1 2,C15,C18,C 20,C22,C23 |
100nF、smc0402、16V、+/-10% | セラミックコンデンサ XR7 | どれでも | どれでも |
| 6 | 2 | C8、C9 | 15pF、smc0402、16V、+/-10% | セラミックコンデンサ XR7 | どれでも | どれでも |
| 7 | 2 | C11、C16 | 4.7uF、smc0402、16V、+/-10% | セラミックコンデンサ XR7 | どれでも | どれでも |
| 8 | 1 | C13 | 4.7nF、SMC0402、16V、+/-10% | セラミックコンデンサ XR7 | どれでも | どれでも |
| 9 | 4 | D1、D2、D3、D4 | BAT60J、sod323、10V、3A | 10 V 汎用信号ショットキー ダイオード | ST | BAT60J |
| 10 | 1 | D5 | ESDA7P60-1U1M, SMD1610 | ハイパワートランジェントvoltageサプレッサー(TVS) | ST | ESDA7P60-1U1M |
| 11 | 3 | LD1、LD2、LD3 | 赤色 LED、smd0603、SMD | 赤色LED | オスラムオプト | LRQ396 |
| 13 | 1 | P1 | モーターパネル1、siptm2002 | ストリップライン オス 1X2 ピッチ 2.54 mm 90 度 | アダムテック | PH1RA-02-UA |
| 14 | 1 | P2 | モーターパネル3、siptm2002 | ストリップライン オス 1X2 ピッチ 2.54 mm 90 度 | アダムテック | PH1RA-02-UA |
| 15 | 1 | P3 | i2Q、siptm4004 | ストリップライン オス 1X4 ピッチ 2.54 mm | Wurth Elektronik | 61300411121 |
| 16 | 1 | P4 | モーターパネル2、siptm2002 | ストリップライン オス 1X2 ピッチ 2.54 mm 90 度 | アダムテック | PH1RA-02-UA |
| 17 | 1 | P5 | モーターパネル4、siptm2002 | ストリップライン オス 1X2 ピッチ 2.54 mm 90 度 | アダムテック | PH1RA-02-UA |
| 18 | 1 | P6 | FC_Signal、siptm6006 | ストリップライン オス 1X6 ピッチ 2.54 mm | Wurth Elektronik | 61300611121 |
| アイテム | 数量 | 参照 | パーツ/値 | 説明 | メーカー | 注文コード |
| 19 | 1 | P7 | USART、siptm4004 | ストリップライン オス 1X4 ピッチ 2.54 mm | Wurth Elektronik | 61300411121 |
| 20 | 1 | P8 | SWD、 Ampモード10X1M27 | コネクタ 2X5 ピッチ 1,27 mm | サムテック | FTSH-105-01-FDK |
| 21 | 4 | Q1、Q2、Q3、Q4 | STL6N3LLH6、 パワーFLAT2X2 |
Nチャネル30 V、0.021 オーム 標準、6 A STripFET H6 パワー MOSFET (PowerFLAT 2×2 パッケージ) |
ST | 言語 |
| 22 | 1 | R1 | 47k、smr0402、1/16W、+/-1% | SMD厚膜抵抗器 | どれでも | どれでも |
| 23 | 4 | R2、R3、R6、R8 | 1K、smr0402、1/16W、+/-1% | SMD厚膜抵抗器 | どれでも | どれでも |
| 24 | 7 | R4、R5、R7、R9、R10、R23、R24 | 10K、smr0402、1/16W、+/-1% | SMD厚膜抵抗器 | どれでも | どれでも |
| 25 | 1 | R11 | 20K、smr0402、1/16W、+/-1% | SMD厚膜抵抗器 | どれでも | どれでも |
| 26 | 4 | R12、R13、R16、R17、R25 | smr0603、1/16W、+/-1% | SMD厚膜抵抗器 | どれでも | どれでも |
| 27 | 4 | R14、R15、R18、R19 | NA、smr0402、1/16W、±1% | SMD厚膜抵抗器 | どれでも | どれでも |
| 28 | 2 | R20、R21 | 2.2K、smr0402、1/16W、±1% | SMD厚膜抵抗器 | どれでも | どれでも |
| 29 | 3 | R22、R27、R2 8 | 100K、smr0402、1/16W、±1% | SMD厚膜抵抗器 | どれでも | どれでも |
| 30 | 1 | R26 | 1M、SMR0402、1/16W、±1% | SMD厚膜抵抗器 | どれでも | どれでも |
| 31 | 1 | R29 | 510R、smr0402、1/16W、±1% | SMD厚膜抵抗器 | どれでも | どれでも |
| 32 | 1 | R30 | 5.1K、smr0402、1/16W、±1% | SMD厚膜抵抗器 | どれでも | どれでも |
| 33 | 1 | S1 | リセット、PushKMR22 | ボタンを押す | C&K | KMR231GLFS |
| 34 | 1 | U1 | BLUENRG-M0A、spbtrfle | Bluetooth® low energy v4.2 向け超低消費電力ネットワーク プロセッサ モジュール | ST | ブルーNRG-M0 |
| 35 | 1 | U2 | STM32F401CCU, UFQFPN48X7X7 | 高性能アクセスライン、DSPとFPUを備えたArm Cortex-M4コア、256KBのフラッシュメモリ、84MHzのCPU、 | ST | STM32F401CCU |
| アイテム | 数量 | 参照 | パーツ/値 | 説明 | メーカー | 注文コード |
| ARTアクセラレータ | ||||||
| 36 | 1 | U3 | USBULC6-2M6(uQFN), uQFN6X145X1 | 超広帯域ESD保護 | ST | USBULC6-2M6 |
| 37 | 1 | U4 | STC4054GR、SOT23L5 | 温度調節機能付き 800 mA スタンドアロン リニア Li-Ion バッテリー充電器 | ST | STC4054GR |
| 39 | 1 | U6 | LD39015M33R、sot23l5 | 150mAの低静止電流、低ノイズボリュームtageレギュレーター | ST | LD39015M33R |
| 40 | 1 | U7 | LPS22HHTR, HLGA10X2X2X07 | 高性能MEMSナノ圧力センサー: 260~1260 hPa絶対デジタル出力気圧計 |
ST | LPS22HHTR |
| 41 | 1 | U8 | LSM6DSRTR, lga14X2m5X3X086 | iNEMO 慣性モジュール: 3D 加速度計と 3D ジャイロスコープ | ST | LSM6DSRTR |
| 42 | 1 | Y1 | 16MHz、15ppm | 石英 | NDK | NX2520SA-16,000000MHz- STD-CSW-4 |
| 43 | 1 | なし | アーム-JTAG-20-10 | ミニボードとケーブル | オリメックス株式会社 | アーム-JTAG-20-10 |
ボードバージョン
| 良い仕上がり | 概略図 | 部品表 |
| ステバル$FCU001V2A(1) | STEVAL$FCU001V2A 回路図 | STEVAL$FCU001V2A 部品表 |
1. このコードは、STEVAL-FCU001V2 評価ボードの最初のバージョンを識別します。
規制コンプライアンス情報
米国連邦通信委員会(FCC)が要求する正式な通知
米国に所在する責任者の連絡先:氏名:Francesco Doddo、住所:STMicroelectronics Inc、200 Summit Drive、Suite 405、Burlマサチューセッツ州イントン、01803、米国;電子メール: フランチェスコ・ドドド@st.com このデバイスは、FCC 規則のパート 15 に準拠しています。 操作には次の 1 つの条件が適用されます。(2) このデバイスは有害な干渉を引き起こさないこと、および (XNUMX) このデバイスは、望ましくない操作を引き起こす可能性のある干渉を含め、受信した干渉を受け入れる必要があります。 製造元によって明示的に承認されていない変更または修正は、機器を操作するユーザーの権限を無効にする可能性があります。
注記: この機器は、FCC 規則のパート 15 に従ってテストされ、クラス B デジタル デバイスの制限に準拠していることが確認されています。これらの制限は、住宅への設置において有害な干渉に対する適切な保護を提供するように設計されています。この機器は無線周波数エネルギーを生成、使用し、放射する可能性があり、指示に従って設置および使用しないと、無線通信に有害な干渉を引き起こす可能性があります。
ただし、特定の設置環境で干渉が発生しないという保証はありません。この機器がラジオやテレビの受信に有害な干渉を引き起こしている場合(機器の電源をオン/オフすることで確認できます)、ユーザーは次の 1 つ以上の方法で干渉を修正することをお勧めします。
- 受信アンテナの向きを変えるか、位置を変えてください。
- 機器と受信機間の距離を広げます。
- 受信機が接続されている回路とは別のコンセントに機器を接続します。
- 販売店または経験豊富なラジオ/テレビ技術者にご相談ください。
適用される規格: FCC CFR Part 15 Subpart B。適用されるテスト方法: ANSI C63.4 (2014)。
カナダ産業省が義務付ける正式な製品通知
カナダに所在する責任者の連絡先: 氏名: John Langner、住所: STMicroelectronics, Inc., 350 Burnhamthorpe Road West, Suite 303 L5B 3J1, Mississauga, ON, Canada、電子メール: 連絡先
カナダイノベーション・科学・経済開発省のコンプライアンス
このデバイスには、カナダのイノベーション科学経済開発省のライセンス免除RSSに準拠するライセンス免除送信機/受信機が含まれています。 操作には、次の1つの条件があります。(2)このデバイスは干渉を引き起こさない可能性があります。 (XNUMX)このデバイスは、デバイスの望ましくない動作を引き起こす可能性のある干渉を含む、あらゆる干渉を受け入れる必要があります。
適用される規格: ICES-003 発行 7 (2020)、クラス B。適用される試験方法: ANSI C63.4 (2014)。
欧州連合に対する通知
キットSTEVAL-FCU001V2は、指令2014/53/EU(RED)の必須要件に準拠しています。
および指令 2015/863/EU (RoHS) に準拠しています。適用される整合規格は、EU 適合宣言に記載されています。
英国向けの通知
キット STEVAL-FCU001V2 は、英国無線機器規制 2017 (UK SI 2017 No.
1206 号および修正) および 2012 年電気電子機器における特定有害物質の使用制限規則 (UK SI 2012 No. 3032 および修正) に準拠しています。適用される規格は、英国適合宣言書に記載されています。
改訂履歴
表9. 文書の改訂履歴
| 日付 | リビジョン | 変更点 |
| 22年2023月XNUMX日 | 1 | 初回リリース。 |
| 24年2024月XNUMX日 | 2 | はじめに、セクション 2: ハードウェアの説明、セクション 3: システム セットアップ ガイドを更新しました。 セクション 3.1: プリインストールされたファームウェアでボードを使用する方法、セクション 3.2: 独自のファームウェアでボードを使用する方法、およびセクション 4: 回路図。 |
重要なお知らせ – よくお読みください
STMicroelectronics NV およびその子会社 (以下「ST」) は、ST 製品および/またはこのドキュメントを予告なしにいつでも変更、修正、拡張、修正、および改善する権利を留保します。購入者は、注文を行う前に ST 製品に関する最新の関連情報を入手する必要があります。ST 製品は、注文確認時に適用される ST の販売条件に従って販売されます。
ST 製品の選択、選択、使用については購入者が単独で責任を負い、ST は購入者の製品の適用支援や設計については一切責任を負いません。
ST は、明示的か黙示的かを問わず、いかなる知的財産権のライセンスも付与しません。
ここに記載されている情報と異なる規定を伴う ST 製品を再販した場合、当該製品に対して ST が付与した保証は無効になります。
STおよびSTロゴはSTの商標です。ST商標に関する追加情報については、 www.st.com/商標その他すべての製品名またはサービス名は、それぞれの所有者の財産です。
このドキュメントの情報は、このドキュメントの以前のバージョンで以前に提供された情報に優先し、置き換えられます。
© 2024 STマイクロエレクトロニクス – 無断転載を禁じます![]()
ドキュメント / リソース
 |
STMicroelectronics UM2958 STEVAL-FCU001V2 フライト コントローラ ユニット評価ボード [pdf] ユーザーマニュアル UM2958、UM2958 STEVAL-FCU001V2 フライト コントローラ ユニット評価ボード、STEVAL-FCU001V2 フライト コントローラ ユニット評価ボード、フライト コントローラ ユニット評価ボード、コントローラ ユニット評価ボード、評価ボード |