Hi-Link HLK-LD2451 車両状態検出モジュール
製品情報
仕様
- 製品名: HLK-LD2451 車両状態検出モジュール
- メーカー: 深センハイリンク電子株式会社
- センシング技術: FMCW FM連続波レーダー信号処理
- 検知距離: 最大100m
- 出力: 速度、角度、距離、その他の補助情報
- 出力インターフェース: GPIO と UART
- 周波数帯域: 24GHz ISMバンド
- 認定: FCCおよびCE
製品使用説明書
インストール
車両検出が必要なエリアに見通しの利く場所にモジュールがしっかりと取り付けられていることを確認します。必要な電源ケーブルと通信ケーブルを接続します。
構成
提供されているモバイル ソフトウェアを使用して、アプリケーションの要件に応じて、検知距離、速度、ターゲット方向、感度などのパラメータを構成します。
統合
GPIO または UART 出力を利用して、検出モジュールを目的のインテリジェント シーンまたは端末製品に統合します。プラグ アンド プレイ機能により、柔軟なアプリケーションが可能になります。
手術
リアルタイムの出力検出結果を監視して、エリアに近い車両や遠い車両を識別します。必要に応じて、モバイルのデバッグと構成に提供されているツールを活用します。
よくある質問(FAQ)
- HLK-LD2451 モジュールの最大検知距離はどれくらいですか?
このモジュールは最大 100 メートルの距離にある車両を感知できます。 - 検出パラメータはカスタマイズできますか?
はい、提供されるモバイル ソフトウェアを使用すると、特定のアプリケーションのニーズに合わせて、検知距離、速度、ターゲット方向などのパラメータを簡単に構成できます。 - HLK-LD2451 モジュールはどのようなシナリオで使用できますか?
このモジュールは、高速道路の交差点、非自動車道路、高速道路、スマートシーンなど、さまざまなシナリオで使用でき、車両を検出してさまざまなアプリケーションを支援します。
製品プロfile
- HLK-LD2451は、Hi-Link Electronicsが開発した高感度24GHzモバイル車両状態検知モジュールです。その動作原理は、FMCW FM連続波を使用して検出範囲内のターゲットを検出し、レーダー信号処理と正確なアルゴリズム認識を組み合わせて、高感度の車両状態検出を実現し、近い車両または遠い車両を識別し、ターゲットの速度、角度、距離などの補助情報を出力します。
- この製品は主に屋外のシーンで使用され、エリアの近くに車両があるか遠くにあるかを感知し、検出結果をリアルタイムで出力し、最長感知距離は100mに達します。最長感知距離は100mまで可能です。モバイルソフトウェアが提供されており、感知距離、速度、ターゲット方向、感度などのパラメータを簡単に設定して、さまざまなアプリケーション要件を満たすことができます。
- GPIO および UART 出力をサポートし、プラグ アンド プレイで、さまざまなインテリジェント シーンや端末製品に柔軟に適用できます。
製品の特徴
- プラグアンドプレイ、簡単な組み立て方法
- 検知距離最大100m
- シーンの変化のニーズを満たすマルチレベルのインテリジェントパラメータ化
- モバイルデバッグおよび構成ツール
- 検出距離を設定可能(10~100m自由に調整可能)
- 最大3車線をカバーする広い検知角度
- 24GHz ISMバンド、FCCおよびCEスペクトル規制認定可能
- 究極のコスト効率の良い選択
アプリケーションシナリオ
HLK-LD2451車両センシングモジュールは、車両に近いか遠いかを問わず車両を検出・認識することができ、マルチレベルのパラメータ化をサポートし、さまざまなインテリジェント製品や端末製品に広く使用できます。一般的に使用されるタイプは次のとおりです。
- 高速道路の交差点
高速道路の交差点に設置し、高速道路を走行する車両の方向(近いか遠いか)、速度、距離などを感知します。 - 非自動車道路
後方視界の死角を検知し、後方から接近する車両や急な車線変更による交通事故を回避 - 高速道路
後方の遠方の車両を検知し、ドライバーが後方車両の軌道を判断できるように支援します。 - スマートシーン
車両の接近を感知し、道路ゲート、ガレージドアなどの自動開閉を自動制御
ハードウェアの説明
外形寸法
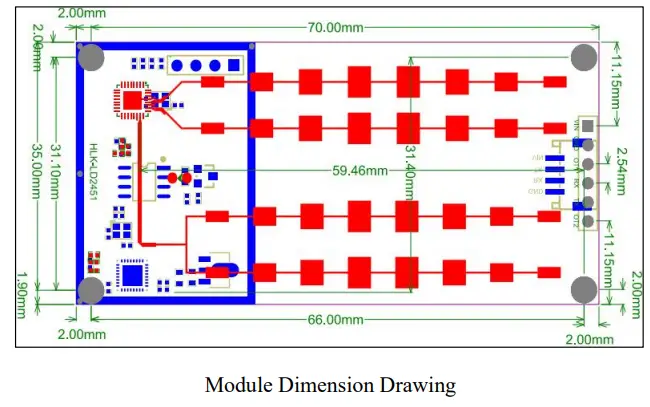
- モジュールサイズ: 70mm×35mm
- ピンホール間隔: 2.54mm
ピンの定義

| ピン
番号 |
表記 | 名前(物の名前) | 機能性 |
| 1 | 車両識別番号 | 電源入力 | 電源入力5V |
| 2 | グランド | パワーグラウンド | パワーグラウンド |
| 3 | OT1 | GPIO1 | インジケータピン、初回起動時に3回連続して高レベルと低レベルを出力、人が近づいていることが検出されると高レベルを出力 |
| 4 | TX | シリアルTX | シリアルTXピン |
| 5 | RX | シリアルポートRX | シリアルRXピン |
| 6 | OT2 | GPIO2 | 一時的に利用できません |
利用と構成
典型的なアプリケーション回路
- LD2451 モジュールは、主に規定のプロトコルによってシリアル ポートを介して検出結果データを出力します。シリアル ポート出力データには、ターゲットのアラーム情報 (ターゲットが近いかどうか)、角度、距離、速度、方向 (近いか遠いか) などの情報が含まれますが、Bluetooth を介して検出結果データを受け取り、シリアル ポート部分の内容も同じものとして出力します。ユーザーは、特定のアプリケーション シナリオに応じて柔軟に使用できます。
- モジュール供給量tageは5Vであり、入力電源のパレス容量は300mA以上である必要があります。
- モジュール IO 出力レベルは 3.3V、シリアル ポートのデフォルトのボー レートは 115200、ストップ ビットは 1、パリティ ビットはありません。
構成パラメータの役割
- ユーザーは、LD2451 のシリアル ポートまたは Bluetooth を介してモジュールの構成パラメータを変更し、さまざまなアプリケーション要件に適応できます。構成内容は電源を切っても失われません。
- 設定可能なパラメータは次のとおりです。
- 最大検出距離
- 最遠検出距離を設定すると、この最遠距離内に現れるターゲットのみが検出され、結果が出力されます。
- 設定範囲0〜100m
- 検査指示
近いターゲットまたは遠いターゲット、または近いターゲットと遠いターゲットのみを検出するように設定できます。
- 最大検出距離
- 近くに設定して同一方向の車両が接近し一定の条件を満たした時のみターゲットを出力し、遠くに設定して対向車や周囲の環境がレーダー検知範囲に入った時のみターゲットを出力します。近くに設定して同一方向、反対方向の車両が検知範囲に入ったかどうかに関係なく遠くでも検知したターゲット情報を出力します。
- 検出速度
- 検出されたターゲットの速度が設定された検出速度よりも大きい場合はターゲットがあると判断され、そうでない場合は無視されます。
- 検知速度は0~120km/hの範囲で設定可能
- 検出遅延
レーダーがターゲットの接近を検出した後の警報遅延時間。範囲は 1 ~ 30 秒です。たとえば、時間を 5 秒に設定した場合、レーダーがターゲットの接近を検出すると、5 秒の遅延警報メッセージが出力され、この期間内にレーダーがターゲットの接近を再度検出すると、今回は更新されます。 - 感度
- このパラメータには、累積トリガーカウントと信号対雑音比しきい値の 1 つのサブパラメータがあります。両方のワードパラメータは独立して設定でき、トリガーカウントパラメータの設定範囲は 10 ~ 1、信号対雑音比パラメータの設定範囲は 255 ~ XNUMX です。
- トリガーカウントを 3 に設定すると、検出されたターゲットが 3 回連続してトリガーされてから、ターゲットの検出情報が報告されます。
- 信号対雑音比パラメータはレーダーの検出感度を決定します。検出感度の値が低いほどトリガーの感度が高くなり、検出感度の値が高いほどトリガーが低くなりにくくなります(デフォルト値は4です。特別な状況ではこのパラメータを変更することは推奨されません)。
- 検出速度
モバイルアプリツールの説明
ユーザーがモジュールを迅速かつ効率的にテストおよび構成できるように、モバイル APP 構成および検出ツールを提供します。ユーザーはこのツール ソフトウェアを使用してモジュールを Bluetooth にリンクし、モジュールのパラメータ構成と読み取りを行うことができるだけでなく、モジュールから検出結果のデータを報告して、検出対象の情報をリアルタイムで表示することもできるため、ユーザーの使用が大幅に容易になります。
- ダウンロードアドレス:
- Android アプリのダウンロードリンク: https://www.pgyer.com/Lq8p
- iOSアプリ: 検索する: HLKRadarTool を App Store で入手
- APPの使用法:
- モジュールを正常に起動すると、「LD2451_XXXX」という名前の Bluetooth が送信されます。
- アプリを開いて対応する権限を有効にした後、「モジュール Bluetooth を接続」をクリックします。
- 接続が成功すると、検出されたターゲット データ情報と対応するプロトコル データがこのインターフェイスに表示されます。
- 設定インターフェースの右上隅をクリックすると、パラメータ設定インターフェースに入り、設定できるパラメータと、上記の「構成パラメータロール」の役割が表示されます。
APP検出データ情報は以下の通りです。

パラメータ設定インターフェース:

設置図と取り付け方向
設置場所:

設置条件
最小取り付けクリアランスを確認する
レーダーに筐体を取り付ける場合、筐体は 24 GHz で良好な電波伝送特性を備え、金属材料や電磁波を遮蔽する材料を含んではなりません。
設置時の注意事項
- レーダーアンテナが検出対象領域にできる限り向いていること、およびアンテナの周囲が開いていて障害物がないことを確認してください。
- レーダー自体の揺れは検出結果に影響を与えるため、センサーがしっかりと安定した位置に取り付けられていることを確認してください。
- レーダーの背面が物体の動きや振動の影響を受けないようにすることが重要です。レーダー波は透過するため、アンテナ信号背面フラップはレーダーの背面にある動く物体を検出する可能性があります。金属シールドまたは金属バッキングプレートを使用してレーダー背面フラップを保護し、レーダーの背面にある物体によって引き起こされる影響を減衰させることができます。
性能と電気パラメータ
| 動作周波数 | 24GHz~24.25GHz
FCC、CE、No Commission認証基準に準拠 |
| 電力要件 | DC 5V、電源容量>300mA |
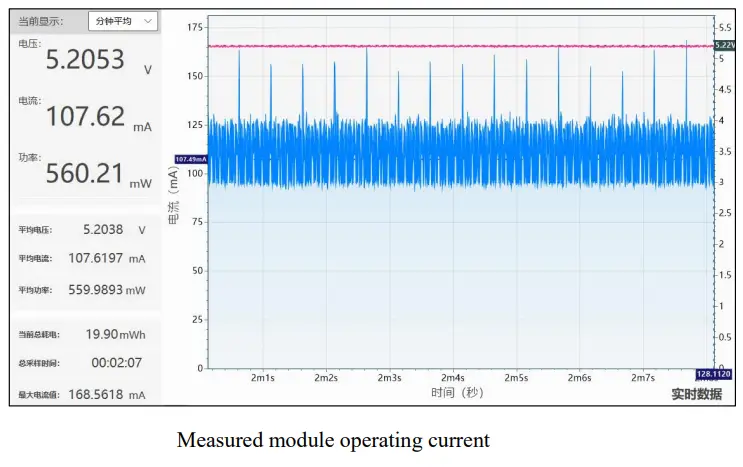
| 平均動作電流 | 107mA |
| 変調方式 | FMWC |
| コネクタ | 2 GPIO、IO レベル 3.3V
1 UART |
| ターゲット 応用 | 屋外車両ターゲット検出 |
| 検出距離 | 最大100m |
| 検出角度 | ±20° |
| 掃引帯域幅 | <200MHz
FCC、CE、No Commission認証基準を満たしています |
| 動作温度 | -40〜85°C |
| 全体寸法 | 70mm×35mm |
改訂記録
| 改訂日 | リリース | 変更内容 |
| 2024-5-7 | 1.0 | 初期バージョン |
技術サポートと連絡先
ドキュメント / リソース
 |
Hi-Link HLK-LD2451 車両状態検出モジュール [pdf] ユーザーマニュアル HLK-LD2451 車両状態検出モジュール、HLK-LD2451、車両状態検出モジュール、状態検出モジュール、検出モジュール、モジュール |



