EMKO PROOP 入力または出力モジュール

序文
Proop-I/O モジュールは Prop デバイスで使用されます。また、あらゆるブランドのデータ パスとしても使用できます。このドキュメントは、ユーザーが Proop-I/O モジュールをインストールして接続するのに役立ちます。
- この製品のインストールを開始する前に、取扱説明書をお読みください。
- 文書の内容は更新されている可能性があります。最新バージョンは以下からアクセスできます。 翻訳元
- この記号は安全上の警告に使用されます。ユーザーはこれらの警告に注意する必要があります。
環境条件
| 動作温度: | 0-50C |
| 最大湿度: | 0~90%RH(結露なし) |
| 重さ : | 238グラム |
| 寸法 : | 160 x 90 x 35 ミリメートル |
特徴
Proop-I/O モジュールは、入出力に応じていくつかのタイプに分かれています。タイプは次のとおりです。
| 製品タイプ
証明-I/OP |
A |
. |
B |
. |
C |
. |
D |
. |
E |
. |
F |
| 2 | 2 | 1 | 3 | ||||||||
| モジュール供給 | |||||||||||
| 24 Vdc/Vac (絶縁) | 2 | |||
| コミュニケーション | ||||
| RS-485 (絶縁) | 2 | |||
| デジタル入力 | ||||
| 8x Digital | 1 | |||
| デジタル出力 | ||||
| 8x 1Aトランジスタ(+V) | 3 | |||
| アナログ入力 | ||||
| 5x Pt-100 (-200…650°C)
5x 0/4..20mAdc 5x 0…10Vdc 5x 0…50mV |
1 | ||
| 2 | |||
| 3 | |||
| 4 | |||
| アナログ出力 | |||
| 2x 0/4…20mAdc
2x 0…10Vdc |
1 | ||
| 2 | |||
寸法
Proopデバイスへのモジュールの取り付け
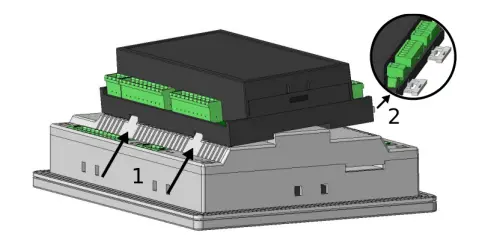 |
1- 図のように、Prop I/O モジュールを Prop デバイスの穴に挿入します。
2- ロック部品が Proop-I/O モジュール デバイスに差し込まれ、引き出されていることを確認します。 |
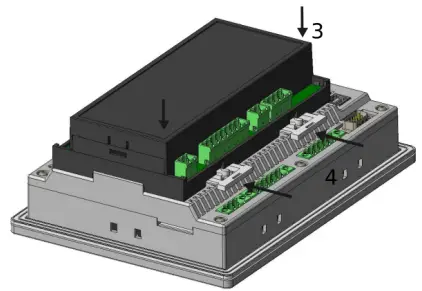 |
3- Proop-I/Oモジュールデバイスを指定の方向にしっかりと押します。
4- ロック部品を押し込んで挿入します。 |
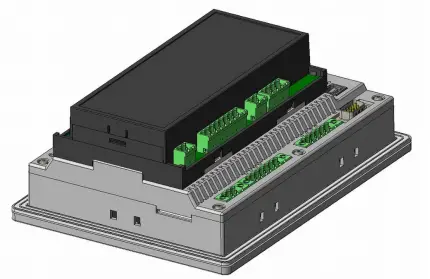 |
5- 挿入されたモジュール デバイスの画像は、左側のようになります。 |
DIN-Rayへのモジュールの取り付け
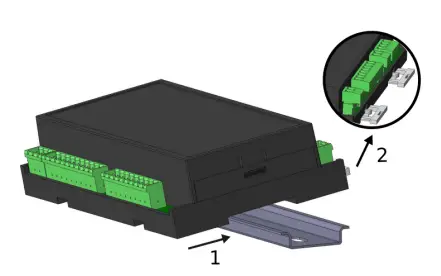 |
1- 図のように、Proop-I/O モジュール デバイスを DIN-ray にドラッグします。
2- ロック部品が Prop-I/O モジュール デバイスに差し込まれ、引き出されていることを確認します。 |
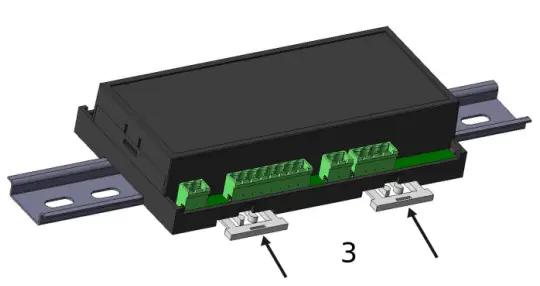 |
3- ロック部品を押し込んで挿入します。 |
 |
4- 挿入されたモジュール デバイスの画像は、左側のようになります。 |
インストール
- この製品のインストールを開始する前に、以下の取扱説明書と警告をよくお読みください。
- 取り付け前に、輸送中に生じた損傷がないかこの製品を目視検査することをお勧めします。資格のある機械および電気技術者がこの製品を取り付けるようにするのはお客様の責任です。
- 可燃性または爆発性のガス雰囲気内では本装置を使用しないでください。
- ユニットを直射日光やその他の熱源にさらさないでください。
- 変圧器、モーターなどの磁気機器や干渉を発生する装置(溶接機など)の近くに本装置を設置しないでください。
- デバイスへの電気ノイズの影響を軽減するため、低電圧tag電子線(特にセンサー入力ケーブル)の配線は、高電流および電圧から分離する必要があります。tageライン。
- 機器をパネルに設置する際、金属部品の鋭利な角で手を切る恐れがありますので、ご注意ください。
- 製品の取り付けは専用の取り付けキットを使用して行う必要があります。amps.
- 不適切なclでデバイスをマウントしないでくださいamps. 取り付け中にデバイスを落とさないでください。
- 可能であれば、シールド ケーブルを使用してください。グランド ループを防止するには、シールドを片端のみで接地する必要があります。
- 感電や装置の損傷を防ぐため、配線がすべて完了するまで装置に電源を入れないでください。
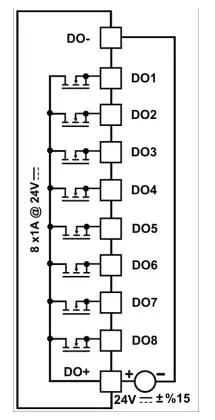
- デジタル出力と電源接続は互いに分離されるように設計されています。
- デバイスを試運転する前に、目的の用途に応じてパラメータを設定する必要があります。
- 不完全または誤った構成は危険です。
- 通常、ユニットには電源スイッチ、ヒューズ、または回路ブレーカーは付属していません。地域の規制に従って、電源スイッチ、ヒューズ、および回路ブレーカーを使用してください。
- 定格電源電圧のみ適用tag機器の損傷を防ぐために、ユニットに e を取り付けてください。
- 本装置の故障や不具合により重大な事故が発生する恐れがある場合は、システムの電源を切り、装置をシステムから取り外してください。
- このユニットを分解、改造、修理しないでください。ampユニットを損傷すると、故障、感電、火災の原因となることがあります。
- 本機の安全な操作に関するご質問は、弊社までお問い合わせください。
- この機器は、この取扱説明書に指定された方法で使用する必要があります。
接続
電源
 |
ターミナル |
| + | |
|
– |
HMIデバイスとの通信リンク
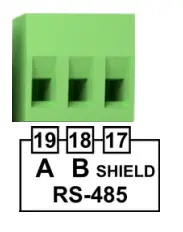 |
ターミナル |
| A | |
| B | |
| グランド |
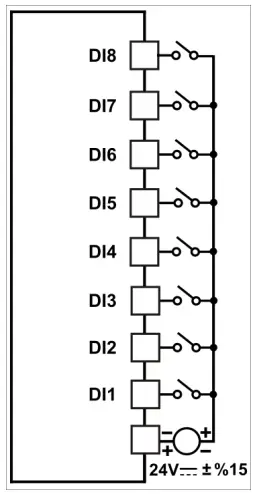
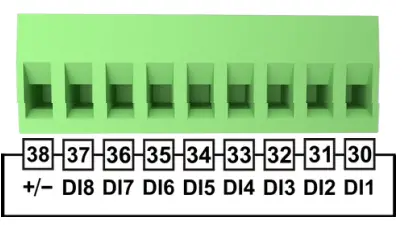
デジタル入力
|
|
ターミナル | コメント | 接続スキーム |
| DI8 |
デジタル入力 |
 |
|
| DI7 | |||
| DI6 | |||
| DI5 | |||
| DI4 | |||
| DI3 | |||
| DI2 | |||
| DI1 | |||
|
+/- |
NPN/PNP
デジタル入力の選択 |
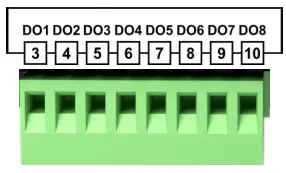
デジタル出力
|
|
ターミナル | コメント | 接続スキーム |
| DO1 |
デジタル出力 |
 |
|
| DO2 | |||
| DO3 | |||
| DO4 | |||
| DO5 | |||
| DO6 | |||
| DO7 | |||
| DO8 |
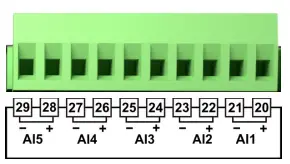
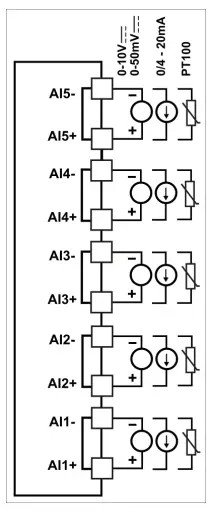
アナログ入力
|
ターミナル | コメント | 接続スキーム |
| AI5- |
アナログ入力5 |
 |
|
| AI5 + | |||
| AI4- |
アナログ入力4 |
||
| AI4 + | |||
| AI3- |
アナログ入力3 |
||
| AI3 + | |||
| AI2- |
アナログ入力2 |
||
| AI2 + | |||
| AI1- |
アナログ入力1 |
||
| AI1 + |
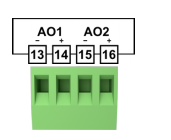
アナログ出力
|
|
ターミナル | コメント | 接続スキーム |
|
AO + |
アナログ出力電源 |
 |
|
|
あお~ |
|||
|
AO1 |
アナログ出力 |
||
|
AO2 |
技術的特徴
電源
| 電源 | : | 24VDC |
| 許容範囲 | : | 20.4~27.6VDC |
| 消費電力 | : | 3W |
デジタル入力
| デジタル入力 | : | 8入力 | |
| 公称入力ボリュームtage | : | 24VDC | |
|
入力ボリュームtage |
: |
ロジック0の場合 | ロジック1の場合 |
| <5 VDC | >10 VDC | ||
| 入力電流 | : | 最大6mA | |
| 入力インピーダンス | : | 5.9kΩ | |
| 応答時間 | : | '0' から '1' 50ms | |
| ガルバニック絶縁 | : | 500VACで1分間 | |
高速カウンター入力
| HSC入力 | : | 2入力(HSC1: DI1とDI2、HSC2: DI3とDI4) | |
| 公称入力ボリュームtage | : | 24VDC | |
|
入力ボリュームtage |
: |
ロジック0の場合 | ロジック1の場合 |
| <10 VDC | >20 VDC | ||
| 入力電流 | : | 最大6mA | |
| 入力インピーダンス | : | 5.6kΩ | |
| 周波数範囲 | : | 単相の場合は最大15KHz、二相の場合は最大10KHz | |
| ガルバニック絶縁 | : | 500VACで1分間 | |
デジタル出力
| デジタル出力 | 8出力 | |
| 出力電流 | : | 最大1A(合計電流最大8A) |
| ガルバニック絶縁 | : | 500VACで1分間 |
| 短絡保護 | : | はい |
アナログ入力
| アナログ入力 | : | 5入力 | |||
|
入力インピーダンス |
: |
PT-100 | 0/4-20mA | 0-10V | 0-50mV |
| -200oC-650oC | 100Ω | >6.6kΩ | >10MΩ | ||
| ガルバニック絶縁 | : | いいえ | |||
| 解決 | : | 14ビット | |||
| 正確さ | : | ±0,25% | |||
| Sampリンタイム | : | 250ミリ秒 | |||
| ステータス表示 | : | はい | |||
アナログ出力
|
アナログ出力 |
: |
2出力 | |
| 0/4-20mA | 0-10V | ||
| ガルバニック絶縁 | : | いいえ | |
| 解決 | : | 12ビット | |
| 正確さ | : | フルスケールの1% | |
内部アドレスの定義
通信設定:
| パラメータ | 住所 | オプション | デフォルト |
| ID | 40001 | 1–255 | 1 |
| ボーレート | 40002 | 0-1200 / 1-2400 / 2-4000 / 3-9600 / 4-19200 / 5-38400 /
6- 57600 /7- 115200 |
6 |
| ストップビット | 40003 | 0- 1ビット / 1- 2ビット | 0 |
| パリティ | 40004 | 0- なし / 1- 偶数 / 2- 奇数 | 0 |
デバイスアドレス:
| メモリ | 形式 | アランジュ | 住所 | タイプ |
| デジタル入力 | Dイン | 0~7まで | 10001 – 10008 | 読む |
| デジタル出力 | ドン | 0~7まで | 1 – 8 | 読み書き |
| アナログ入力 | AIn | 0~7まで | 30004 – 30008 | 読む |
| アナログ出力 | Aオン | 0~1まで | 40010 – 40011 | 読み書き |
| バージョン* | (ああああああ)少し | 0 いいえ | 30001 | 読む |
- 注記:このアドレスの a ビットはメジャー、b ビットはマイナー バージョン番号、c ビットはデバイス タイプを示します。
- Examp上: 30001 (0x2121)hex から読み取られた値 = (0010000100100001)bit、
- a ビット (001) ビット = 1 (メジャーバージョン番号)
- b ビット (00001) ビット = 1 (マイナーバージョン番号)
- c ビット (00100001) ビット = 33 (デバイスタイプは表に示されています。) デバイスバージョン = V1.1
- デバイスタイプ = 0-10V アナログ入力 0-10V アナログ出力
デバイスタイプ:
| デバイスタイプ | 価値 |
| PT100 アナログ入力 4-20mA アナログ出力 | 0 |
| PT100 アナログ入力 0-10V アナログ出力 | 1 |
| 4-20mA アナログ入力 4-20mA アナログ出力 | 16 |
| 4-20mAアナログ入力 0-10Vアナログ出力 | 17 |
| 0-10Vアナログ入力 4-20mAアナログ出力 | 32 |
| 0-10Vアナログ入力 0-10Vアナログ出力 | 33 |
| 0-50mVアナログ入力 4-20mAアナログ出力 | 48 |
| 0-50mVアナログ入力 0-10Vアナログ出力 | 49 |
アナログ入力タイプに応じてモジュールから読み取られた値の変換を次の表に示します。
| アナログ入力 | 値の範囲 | 変換 要素 | ExampPROOPに表示される値 |
|
PT-100 -200° – 650° |
-2000 – 6500 |
10倍–1 |
Example-1: 読み取られた値100は10に変換されますoC. |
| Example-2: 読み取られた値203は20.3に変換されますoC. | |||
| 0 – 10V | 0 – 20000 | 0.5×10–3 | Example-1: 読み取られた値 2500 は 1.25V に変換されます。 |
| 0 – 50mV | 0 – 20000 | 2.5×10–3 | Example-1: 読み取られた値3000は7.25mVに変換されます。 |
|
0/4 – 20mA |
0 – 20000 |
0.1×10–3 |
Example-1: 読み取られた値3500は7mAに変換されます。 |
| Example-2: 読み取られた値1000は1mAに変換されます。 |
アナログ出力タイプに応じてモジュールに書き込まれる値の変換を次の表に示します。
| アナログ出力 | 値の範囲 | 変換 レート | Exampモジュールに記述された値の |
| 0 – 10V | 0 – 10000 | 10倍3 | Example-1: 1.25V と書き込まれる値が 1250 に変換されます。 |
| 0/4 – 20mA | 0 – 20000 | 10倍3 | Example-1: 1.25mA と表記される値が 1250 に変換されます。 |
アナログ入力固有のアドレス:
| パラメータ | AI1 | AI2 | AI3 | AI4 | AI5 | デフォルト |
| 構成 ビット | 40123 | 40133 | 40143 | 40153 | 40163 | 0 |
| 最小スケール値 | 40124 | 40134 | 40144 | 40154 | 40164 | 0 |
| 最大スケール値 | 40125 | 40135 | 40145 | 40155 | 40165 | 0 |
| スケール値 | 30064 | 30070 | 30076 | 30082 | 30088 | – |
アナログ入力構成ビット:
| AI1 | AI2 | AI3 | AI4 | AI5 | 説明 |
| 40123.0少し | 40133.0少し | 40143.0少し | 40153.0少し | 40163.0少し | 4-20mA/2-10V 選択:
0 = 0-20mA/0-10V 1 = 4-20mA/2-10V |
アナログ入力のスケール値は、4-20mA / 2-10V 選択構成ビットの状態に応じて計算されます。
アナログ出力固有のアドレス:
| パラメータ | AO1 | AO2 | デフォルト |
| 入力の最小スケール値 | 40173 | 40183 | 0 |
| 入力の最大スケール値 | 40174 | 40184 | 20000 |
| 出力の最小スケール値 | 40175 | 40185 | 0 |
| 出力の最大スケール値 | 40176 | 40186 | 10000/20000 |
| アナログ出力機能
0: 手動使用 1: 上記のスケール値を使用して、入力を出力に反映します。 2: 出力の最小および最大スケール パラメータを使用して、アナログ出力を PID 出力として駆動します。 |
40177 | 40187 | 0 |
- アナログ出力機能パラメータが 1 または 2 に設定されている場合;
- AI1 は A01 出力の入力として使用されます。
- AI2 は A02 出力の入力として使用されます。
- ない: 入力から出力へのミラーリング機能 (アナログ出力機能 = 1) は、PT100 入力を備えたモジュールでは使用できません。
HSC(高速カウンター)設定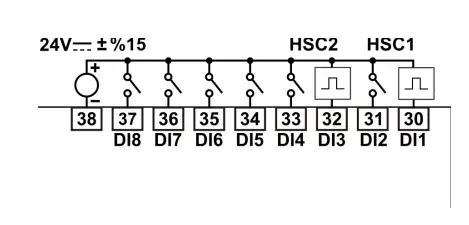
単相カウンター接続
- 高速カウンターは、PROOP-IO スキャン レートでは制御できない高速イベントをカウントします。高速カウンターの最大カウント周波数は、エンコーダー入力の場合は 10kHz、カウンター入力の場合は 15kHz です。
- カウンターには、内部方向制御付き単相カウンター、外部方向制御付き単相カウンター、2 つのクロック入力付き XNUMX 相カウンター、A/B 位相直交カウンター、周波数測定タイプの XNUMX つの基本的なタイプがあります。
- 注記 すべてのモードがすべてのカウンターでサポートされているわけではありません。周波数測定タイプを除く各タイプは、リセットまたはスタート入力なし、リセットありでスタートなし、またはスタートとリセットの両方の入力で使用できます。
- リセット入力をアクティブにすると、現在の値がクリアされ、リセットを非アクティブにするまでクリアされたまま保持されます。
- スタート入力をアクティブにすると、カウンターがカウントできるようになります。スタートが非アクティブになっている間は、カウンターの現在の値は一定に保持され、クロッキング イベントは無視されます。
- スタートが非アクティブなときにリセットがアクティブになると、リセットは無視され、現在の値は変更されません。リセット入力がアクティブなときにスタート入力がアクティブになると、現在の値はクリアされます。
| パラメータ | 住所 | デフォルト |
| HSC1 構成およびモード選択* | 40012 | 0 |
| HSC2 構成およびモード選択* | 40013 | 0 |
| HSC1 新しい現在の値 (最下位 16 バイト) | 40014 | 0 |
| HSC1 新しい現在の値 (最上位 16 バイト) | 40015 | 0 |
| HSC2 新しい現在の値 (最下位 16 バイト) | 40016 | 0 |
| HSC2 新しい現在の値 (最上位 16 バイト) | 40017 | 0 |
| HSC1 現在の値 (最下位 16 バイト) | 30010 | 0 |
| HSC1 現在の値 (最上位 16 バイト) | 30011 | 0 |
| HSC2 現在の値 (最下位 16 バイト) | 30012 | 0 |
| HSC2 現在の値 (最上位 16 バイト) | 30013 | 0 |
注記: このパラメータ;
- 最下位バイトは Mode パラメータです。
- 最も重要なバイトは構成パラメータです。
HSC 構成の説明:
| HSC1 | HSC2 | 説明 |
| 40012.8少し | 40013.8少し | リセットのアクティブレベル制御ビット:
0 = リセットはアクティブロー 1 = リセットはアクティブハイ |
| 40012.9少し | 40013.9少し | スタートのアクティブレベル制御ビット:
0 = スタートはアクティブロー 1 = スタートはアクティブハイ |
| 40012.10少し | 40013.10少し | カウント方向制御ビット:
0 = カウントダウン 1 = カウントアップ |
| 40012.11少し | 40013.11少し | 新しい現在の値を HSC に書き込みます。
0 = 更新なし 1 = 現在の値を更新 |
| 40012.12少し | 40013.12少し | HSC を有効にします。
0 = HSCを無効にする 1 = HSCを有効にする |
| 40012.13少し | 40013.13少し | 予約する |
| 40012.14少し | 40013.14少し | 予約する |
| 40012.15少し | 40013.15少し | 予約する |
HSC モード:
| モード | 説明 | 入力 | |||
| HSC1 | DI1 | DI2 | DI5 | DI6 | |
| HSC2 | DI3 | DI4 | DI7 | DI8 | |
| 0 | 内部方向付き単相カウンタ | クロック | |||
| 1 | クロック | リセット | |||
| 2 | クロック | リセット | 始める | ||
| 3 | 外部方向付き単相カウンタ | クロック | 方向 | ||
| 4 | クロック | 方向 | リセット | ||
| 5 | クロック | 方向 | リセット | 始める | |
| 6 | 2クロック入力付きXNUMX相カウンター | クロックアップ | クロックダウン | ||
| 7 | クロックアップ | クロックダウン | リセット | ||
| 8 | クロックアップ | クロックダウン | リセット | 始める | |
| 9 | A/B 位相エンコーダカウンタ | 時計A | 時計B | ||
| 10 | 時計A | 時計B | リセット | ||
| 11 | 時計A | 時計B | リセット | 始める | |
| 12 | 予約する | ||||
| 13 | 予約する | ||||
| 14 | 周期測定(10μs samp長い時間) | 期間入力 | |||
| 15 | カウンター /
周期 オルチュム (1ms samp長い時間) |
最大15kHz | 最大15kHz | 最大1kHz | 最大1kHz |
モード 15 の特定のアドレス:
| パラメータ | DI1 | DI2 | DI3 | DI4 | DI5 | DI6 | DI7 | DI8 | デフォルト |
| 構成 ビット | 40193 | 40201 | 40209 | 40217 | 40225 | 40233 | 40241 | 40249 | 2 |
| 期間リセット時間 (1-1000 sn) |
40196 |
40204 |
40212 |
40220 |
40228 |
40236 |
40244 |
40252 |
60 |
| カウンタ下位16ビット値 | 30094 | 30102 | 30110 | 30118 | 30126 | 30134 | 30142 | 30150 | – |
| カウンター上位16ビット値 | 30095 | 30103 | 30111 | 30119 | 30127 | 30135 | 30143 | 30151 | – |
| 周期下位16ビット値(ms) | 30096 | 30104 | 30112 | 30120 | 30128 | 30136 | 30144 | 30152 | – |
| 周期上位16ビット値(ms) | 30097 | 30105 | 30113 | 30121 | 30129 | 30137 | 30145 | 30153 | – |
構成 ビット:
| DI1 | DI2 | DI3 | DI4 | DI5 | DI6 | DI7 | DI8 | 説明 |
| 40193.0少し | 40201.0少し | 40209.0少し | 40217.0少し | 40225.0少し | 40233.0少し | 40241.0少し | 40249.0少し | DIx 有効化ビット: 0 = DIx 有効 1 = DIx 無効 |
|
40193.1少し |
40201.1少し |
40209.1少し |
40217.1少し |
40225.1少し |
40233.1少し |
40241.1少し |
40249.1少し |
カウント方向ビット:
0 = カウントダウン 1 = カウントアップ |
| 40193.2少し | 40201.2少し | 40209.2少し | 40217.2少し | 40225.2少し | 40233.2少し | 40241.2少し | 40249.2少し | 予約する |
| 40193.3少し | 40201.3少し | 40209.3少し | 40217.3少し | 40225.3少し | 40233.3少し | 40241.3少し | 40249.3少し | DIxカウントリセットビット:
1 = DIxカウンタをリセットする |
PID設定
PID またはオン/オフ制御機能は、モジュール内の各アナログ入力に決定されたパラメータを設定することで使用できます。PID またはオン/オフ機能が有効になっているアナログ入力は、対応するデジタル出力を制御します。PID またはオン/オフ機能が有効になっているチャネルに関連付けられているデジタル出力は、手動で制御できません。
- アナログ入力 AI1 はデジタル出力 DO1 を制御します。
- アナログ入力 AI2 はデジタル出力 DO2 を制御します。
- アナログ入力 AI3 はデジタル出力 DO3 を制御します。
- アナログ入力 AI4 はデジタル出力 DO4 を制御します。
- アナログ入力 AI5 はデジタル出力 DO5 を制御します。
PIDパラメータ:
| パラメータ | 説明 |
| PIDアクティブ | PID または ON/OFF 操作を有効にします。
0 = 手動使用 1 = PID アクティブ 2 = ON/OFF アクティブ |
| 値の設定 | PID または ON/OFF 動作の設定値です。PT100 の値は、入力の場合は -200.0 ~ 650.0、その他のタイプの場合は 0 ~ 20000 の範囲になります。 |
| オフセットを設定 | PID操作でオフセット値として使用されます。-325.0から
PT325.0 入力の場合は 100、その他のタイプの場合は -10000 ~ 10000。 |
| ヒステリシスの設定 | ON/OFF操作におけるヒステリシス値の設定として使用されます。
PT325.0 入力の場合は -325.0 から 100、その他のタイプの場合は -10000 から 10000。 |
| 最小スケール値 | 作業スケールは下限値です。PT100の値は-200.0から
入力の場合は 650.0、その他のタイプの場合は 0 と 20000。 |
| 最大スケール値 | 作業スケールは上限値です。PT100の値は-200.0から
入力の場合は 650.0、その他のタイプの場合は 0 と 20000。 |
| 加熱比例値 | 加熱の比例値。0.0 から 100.0 までの値を取ることができます。 |
| 加熱積分値 | 加熱の積分値。0~3600秒の範囲の値を取ることができます。 |
| 加熱導関数値 | 加熱の微分値。0.0 から 999.9 までの値を取ることができます。 |
| 冷却比例値 | 冷却の比例値。0.0 から 100.0 までの値を取ることができます。 |
| 冷却積分値 | 冷却の積分値。0 ~ 3600 秒の範囲の値を取ることができます。 |
| 冷却導関数値 | 冷却の微分値。0.0 ~ 999.9 の範囲の値を取ることができます。 |
| 出力期間 | 出力は制御期間です。1〜150秒の範囲の値を取ることができます。 |
| 暖房/冷房選択 | PIDまたはON/OFFのチャンネル動作を指定します。0 = 加熱 1 = 冷却 |
| オートチューン | PIDの自動調整操作を開始します。
0 = オートチューンパッシブ 1 = オートチューンアクティブ |
- 注記: ドット表記の値については、Modbus 通信ではこれらのパラメータの実際の値の 10 倍が使用されます。
PID Modbus アドレス:
| パラメータ | AI1
住所 |
AI2
住所 |
AI3
住所 |
AI4
住所 |
AI5
住所 |
デフォルト |
| PIDアクティブ | 40023 | 40043 | 40063 | 40083 | 40103 | 0 |
| 値の設定 | 40024 | 40044 | 40064 | 40084 | 40104 | 0 |
| オフセットを設定 | 40025 | 40045 | 40065 | 40085 | 40105 | 0 |
| センサーオフセット | 40038 | 40058 | 40078 | 40098 | 40118 | 0 |
| ヒステリシスの設定 | 40026 | 40046 | 40066 | 40086 | 40106 | 0 |
| 最小スケール値 | 40027 | 40047 | 40067 | 40087 | 40107 | 0/-200.0 |
| 最大スケール値 | 40028 | 40048 | 40068 | 40088 | 40108 | 20000/650.0 |
| 加熱比例値 | 40029 | 40049 | 40069 | 40089 | 40109 | 10.0 |
| 加熱積分値 | 40030 | 40050 | 40070 | 40090 | 40110 | 100 |
| 加熱導関数値 | 40031 | 40051 | 40071 | 40091 | 40111 | 25.0 |
| 冷却比例値 | 40032 | 40052 | 40072 | 40092 | 40112 | 10.0 |
| 冷却積分値 | 40033 | 40053 | 40073 | 40093 | 40113 | 100 |
| 冷却導関数値 | 40034 | 40054 | 40074 | 40094 | 40114 | 25.0 |
| 出力期間 | 40035 | 40055 | 40075 | 40095 | 40115 | 1 |
| 暖房/冷房選択 | 40036 | 40056 | 40076 | 40096 | 40116 | 0 |
| オートチューン | 40037 | 40057 | 40077 | 40097 | 40117 | 0 |
| PID瞬時出力値(%) | 30024 | 30032 | 30040 | 30048 | 30056 | – |
| PID ステータス ビット | 30025 | 30033 | 30041 | 30049 | 30057 | – |
| PID 構成ビット | 40039 | 40059 | 40079 | 40099 | 40119 | 0 |
| 自動調整ステータスビット | 30026 | 30034 | 30042 | 30050 | 30058 | – |
PID 構成ビット:
| AI1 アドレス | AI2 アドレス | AI3 アドレス | AI4 アドレス | AI5 アドレス | 説明 |
| 40039.0少し | 40059.0少し | 40079.0少し | 40099.0少し | 40119.0少し | PID一時停止:
0 = PID 操作は継続されます。 1 = PID が停止し、出力がオフになります。 |
PIDステータスビット:
| AI1 アドレス | AI2 アドレス | AI3 アドレス | AI4 アドレス | AI5 アドレス | 説明 |
| 30025.0少し | 30033.0少し | 30041.0少し | 30049.0少し | 30057.0少し | PID計算ステータス:
0 = PID を計算中 1 = PID は計算されていません。 |
|
30025.1少し |
30033.1少し |
30041.1少し |
30049.1少し |
30057.1少し |
積分計算ステータス:
0 = 積分を計算中 1 = 積分は計算されていません |
自動調整ステータスビット:
| AI1 アドレス | AI2 アドレス | AI3 アドレス | AI4 アドレス | AI5 アドレス | 説明 |
| 30026.0少し | 30034.0少し | 30042.0少し | 30050.0少し | 30058.0少し | オートチューンの最初のステップのステータス:
1 = 最初のステップがアクティブです。 |
| 30026.1少し | 30034.1少し | 30042.1少し | 30050.1少し | 30058.1少し | 自動調整の 2 番目のステップのステータス:
1 = XNUMX 番目のステップがアクティブです。 |
| 30026.2少し | 30034.2少し | 30042.2少し | 30050.2少し | 30058.2少し | オートチューンの3番目のステップのステータス:
1 = XNUMX 番目のステップがアクティブです。 |
| 30026.3少し | 30034.3少し | 30042.3少し | 30050.3少し | 30058.3少し | オートチューンの最終ステップのステータス:
1 = 自動チューニングが完了しました。 |
| 30026.4少し | 30034.4少し | 30042.4少し | 30050.4少し | 30058.4少し | 自動調整タイムアウト エラー:
1 = タイムアウトが発生しています。 |
デフォルトで通信設定をインストールする
バージョン V01 のカードの場合;
- I/O モジュール デバイスの電源をオフにします。
- デバイスのカバーを持ち上げます。
- 写真に示すソケットのピン 2 と 4 を短絡します。
- 通電して2秒以上お待ちください。2秒後、通信設定はデフォルトに戻ります。
- 短絡を取り除きます。
- デバイスのカバーを閉じます。
バージョン V02 のカードの場合;
- I/O モジュール デバイスの電源をオフにします。
- デバイスのカバーを持ち上げます。
- 写真に示すソケットにジャンパーを取り付けます。
- 通電して2秒以上お待ちください。2秒後、通信設定はデフォルトに戻ります。
- ジャンパーを取り外します。
- デバイスのカバーを閉じます。
Modbusスレーブアドレス選択
スレーブ アドレスは、Modbus のアドレス 1 で 255 ~ 40001 に設定できます。また、カード上の Dip スイッチを使用して、V02 カードのスレーブ アドレスを設定することもできます。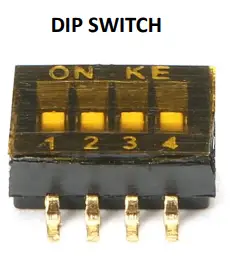
| ディップスイッチ | ||||
| SLAVE ID | 1 | 2 | 3 | 4 |
| ない1 | ON | ON | ON | ON |
| 1 | オフ | ON | ON | ON |
| 2 | ON | オフ | ON | ON |
| 3 | オフ | オフ | ON | ON |
| 4 | ON | ON | オフ | ON |
| 5 | オフ | ON | オフ | ON |
| 6 | ON | オフ | オフ | ON |
| 7 | オフ | オフ | オフ | ON |
| 8 | ON | ON | ON | オフ |
| 9 | オフ | ON | ON | オフ |
| 10 | ON | オフ | ON | オフ |
| 11 | オフ | オフ | ON | オフ |
| 12 | ON | ON | オフ | オフ |
| 13 | オフ | ON | オフ | オフ |
| 14 | ON | オフ | オフ | オフ |
| 15 | オフ | オフ | オフ | オフ |
- 注1: すべてのディップ スイッチがオンの場合、Modbus レジスタ 40001 の値がスレーブ アドレスとして使用されます。
保証
この製品は、購入者への出荷日から 2 年間、材料および製造上の欠陥に対して保証されます。保証は、製造元の判断による欠陥ユニットの修理または交換に限定されます。製品が改造、誤用、分解、またはその他の方法で乱用された場合、この保証は無効になります。
メンテナンス
修理は、訓練を受けた専門の担当者のみが行う必要があります。内部部品にアクセスする前に、デバイスの電源を切ってください。炭化水素ベースの溶剤 (ガソリン、トリクロロエチレンなど) を使用してケースを清掃しないでください。これらの溶剤を使用すると、デバイスの機械的信頼性が低下する可能性があります。
その他の情報
- メーカー情報:
- Emko Elektronik Sanayi ve Ticaret A.Ş.
- ブルサ・オーガナイズ・サナイ・ボルゲシ(フェティエOSBマハー)
- Ali Osman Sönmez Bulvarı、2. ソカク、No:3 16215
- ブルサ/トルコ
- 電話 : (224)261 1900
- ファックス: (224)261 1912
- 修理・メンテナンスサービス情報:
- Emko Elektronik Sanayi ve Ticaret A.Ş.
- ブルサ・オーガナイズ・サナイ・ボルゲシ(フェティエOSBマハー)
- Ali Osman Sönmez Bulvarı、2. ソカク、No:3 16215
- ブルサ/トルコ
- 電話 : (224)261 1900
- ファックス: (224)261 1912
ドキュメント / リソース
 |
EMKO PROOP 入力または出力モジュール [pdf] ユーザーマニュアル PROOP、入力または出力モジュール、PROOP 入力または出力モジュール、入力モジュール、出力モジュール、モジュール |



