![]() 現代の生活を可能にする
現代の生活を可能にする
技術情報
センサー
超音波コントローラ/センサー
改訂履歴
リビジョン一覧表
| 日付 | 変更 |
改訂 |
| 2015年XNUMX月 | 最大動作温度 | 0401 |
| 2015年XNUMX月 | Danfoss レイアウトに変換 | CA |
| 2012年XNUMX月 | コントローラ1035027と1035039を削除しました | BA |
| 2011年XNUMX月 | PLUS+1®準拠を追加 | AB |
| 2011年XNUMX月 | BLN-95-9078の代替品 | AA |
以上view
説明
超音波コントローラ/センサーは、パドル センサーやワンド センサーの代替として開発されました。どちらも非接触式であるため、標準的な機械式センサーに見られる位置や動きの問題はありません。これらの製品は通常、材料の流れを感知して制御するために使用されます。すべてのユニットは、対象表面までの距離を測定し、その結果を出力します。1035019、1035026、1035029、および 1035036 コントローラーこれらのコントローラーは、距離に比例して変化する信号を生成し、油圧トランスミッションの電気変位制御 (EDC) を制御します。コントローラーからの出力は、比例帯域が狭いパルス幅変調のハイサイド スイッチ バルブ ドライブです。操作と取り付けを容易にするために、超音波コントローラー/センサーの感知距離範囲は、スクリードに取り付けられた外部ノブを回すか、デバイスのカバー プレートのドーム スイッチをアクティブ化することで調整できます。1035024 コントローラー
このコントローラは、ソレノイド制御の 1035025 方弁を駆動します。出力は、センサーがターゲットから遠い場合はオン (フル パワー)、ターゲットが近い場合はオフ (ゼロ パワー) になります。高さは、スクリードのノブまたはデバイスのカバー プレートのドーム スイッチをアクティブ化することで調整できます。5024 は、出力が反転していることを除いて 1035022 と同じです。1035028、1035040、1035035、および XNUMX センサー
これらのセンサーはアナログボリュームを生成するtage出力を駆動する ampEDCまたは双方向バルブを制御するための圧力計。出力は動作範囲全体にわたって比例して変化します。1035023センサー
このセンサーは、センサーからターゲットまでの距離に比例したPWM出力を生成します。外部 ampライファイアは、EDC または双方向バルブを制御するための信号を制御します。
6 ページの技術データ、6 ページのコネクタ ピンの定義、および 7 ページの構成を参照してください。
特徴
- 非接触センサー
- 取り付け簡単
- 広い動作範囲
- 駆動出力 ampライファイアーまたはバルブを直接
- 調整可能な設定値
- オン/オフまたは比例コントローラ、または比率センサー
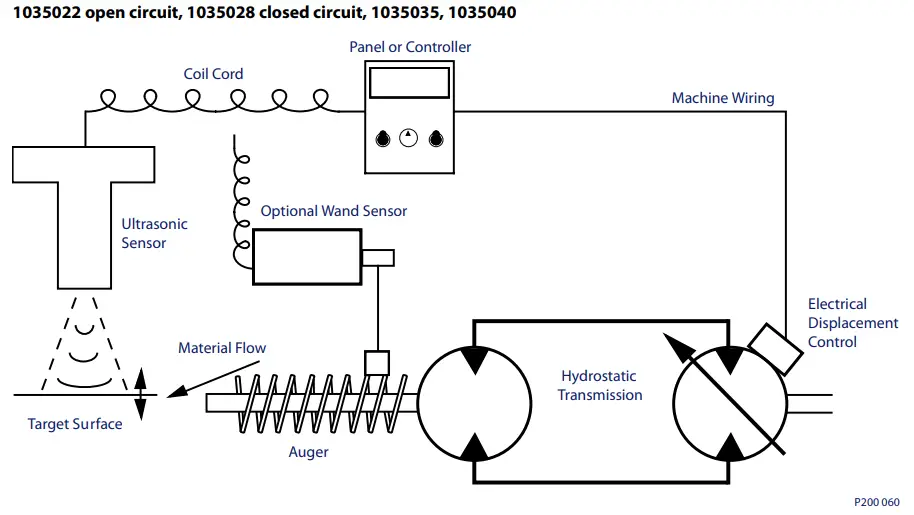
動作原理
超音波コントローラ/センサーのセンサー素子は超音波を生成し、対象表面から反射された信号を受信します。発信と受信の時間差は距離に比例します。センサー製品はこの距離信号をボリュームとして出力します。tageからan amp超音波コントローラ/センサーのコントローラー要素は、センサーと同じセンシングヘッドを使用しますが、1035022 番目の制御出力を提供します。1035028 ページの 1035035、1035040、13、1035019、1035026 を参照してください。
2番目の出力はパルス幅変調(PWM)です。例えばamp例えば、入力ボリュームから変化する矩形波tage(高)からゼロボルト(低)まで、そのパーセントtagサイクルあたりの高時間の長さは、測定された距離によって異なります。PWM 出力は、バルブを直接駆動するように構成されています。コントローラを取り付けたら、デバイスのフェース プレートにあるドーム スイッチまたは離れた場所にあるポテンショメータを使用して、ターゲットからの必要な距離を変更できます。
1035024 の出力は、ソレノイド バルブで使用する場合、オン (フル パワー) またはオフ (ゼロ パワー) のいずれかになります。1035024 ページの 1035025、12 を参照してください。センサーがターゲットから 29 cm 以上離れている場合、最小高さ調整に設定すると、ターゲットが 25 cm 以下になるまでパワーがフル オンになり、その時点でパワーがオフになります。他の超音波コントローラと同様に、目的の高さはドーム スイッチまたはリモート ポットで調整できます。センサー/コントローラからの出力が変化すると、油圧駆動によって材料の流量が変化するため、ターゲットの位置が変更されます。14 ページのコントロール図を参照してください。ターゲットの位置が図の曲線に沿って変化すると、システムは継続的に平衡点を探します。1035026 と 1035022 には比例出力があり、通常は連続出力を生成するため、材料フロー メカニズムの速度が均一に制御されます。 1035024 は、材料の流れの断続的な停止と開始を引き起こす可能性があります。
超音波コントローラ/センサーの一般的な用途には、アスファルト舗装機のオーガ/コンベアの駆動速度の制御、アスファルトまたはコンクリート舗装機のフィードにおけるストライクオフゲートの位置制御、輪郭機構の位置制御、リモート測定および監視などがあります。
関連商品
アクセサリー
| KE14010 フィーダー制御 Ampリファイアー | プリント回路基板である KE14010 は、1035022 または MCX102A ポテンショメータ センサーからの信号を受け取り、油圧ポンプの電気変位制御 (EDC) を作動させます。 |
| KW01028 ケーブル | 1031097、1035026、または 1035024 をマシンのバルクヘッドに接続します。両端に MS コネクタがあります。センサー側に XNUMX つのソケット、マシン側に XNUMX つのソケットがあります。導体は XNUMX 本です。XNUMX フィートのコイル コードは XNUMX フィートまで伸びます。 |
| KW01009 ケーブル | 1035026 または 1035024 をマシンのバルクヘッドに接続します。両端に MS コネクタがあります。両端に XNUMX つのソケットがあります。XNUMX つの導体。XNUMX フィートのコイル コードは XNUMX フィートまで伸びます。 |
| KW01029 ケーブル | 1035022 を MCP112A1011 に接続します。両端に MS コネクタがあります。センサー側に 102 つのソケット、コントローラー側に 1004 つのソケットがあります。導体は XNUMX つ。XNUMX フィートのコイル コードは XNUMX フィートまで伸びます。プラグは MCXXNUMXAXNUMX と互換性があります。 |
| 1031109 ケーブル | 1035026 または 1035024 をマシンのバルクヘッドに接続します。両端に MS コネクタがあります。両端に XNUMX つのソケットがあります。XNUMX つの導体があります。XNUMX フィート半のコイル コードは XNUMX フィート半まで伸びます。 |
| 1035060 リモートポット | システムにポテンショメータをインストールします。 |
技術データ
仕様
| 連続動作温度 | 14〜185°F(-10〜85°C) |
| 供給量tage | 10~30Vdc |
| 動作範囲 | 16~100 cm(6.3~39.4 インチ)はモデルによって異なります。 |
| 比例弁駆動出力(1035026) | 0~240 mA(12オーム負荷で20 Vdc) 0~240 mA(24オーム負荷で80 Vdc)ハイサイドスイッチ |
| バルブ駆動周波数(1035026) | 1000 Hz、パルス幅変調 |
| ON/OFFバルブ駆動出力(1035024) | 2.0 amp 最大7オームの最小負荷ハイサイドスイッチ |
| コントロールバンド (1035024) | 4 cm(1.6インチ) |
| アナログ出力 (1035022) | 1.5インチ(6.3 cm)で16 Vdc 8.5インチ(39.4 cm)で100 Vdc |
| アナログ出力の出力インピーダンス | 1000オーム、最小 |
コネクタピンの定義
| 部品番号 | A | B | C | D | E |
F |
| 1035019 | バット(+) | ポット(-) | バット(-) | PWM出力 | POTフィードバック | ポット(+) |
| 1035022 | バット(+) | DC出力 | バット(-) | 未使用 | 未使用 | 未使用 |
| 1035023 | バット(+) | バット(-) | PWM出力 | バット(-) | 未使用 | 未使用 |
| 1035024 | バット(+) | ポット(+) | バット(-) | オン/オフ出力 | ポット(-) | POTフィードバック |
| 1035025 | バット(+) | ポット(+) | バット(-) | オン/オフ出力 | POTフィードバック | 該当なし |
| 1035026 | バット(+) | ポット(+) | バット(-) | PWM出力 | ポット(-) | POTフィードバック |
| 1035028 | バット(+) | DC出力 | バット(-) | 未使用 | 未使用 | 未使用 |
| 1035029 | バット(+) | ポット(+) | バット(-) | PWM出力 | ポット(-) | POTフィードバック |
| 1035030 | バット(+) | ポット(+) | バット(-) | PWM出力 | ポット(-) | POTフィードバック |
| 1035035 | バット(+) | バット(-) | DC出力 | 未使用 | 未使用 | 該当なし |
| 1035036 | バット(+) | ポット(-) | バット(-) | PWM出力 | POTフィードバック | ポット(+) |
| 1035040 | バット(+) | DC出力 | バット(-) | 未使用 | 未使用 | 未使用 |
構成
構成
| 部品番号 | 検出範囲 | 制御範囲 | コントロールタイプ | 出力周波数 | 出力インピーダンス | 信号消失 出力 | リモートポット |
| 1035019 | 25〜100cm (9.8 ~ 39.4 インチ) |
30 cm(11.8インチ) | 比例PWMハイサイドスイッチング | 200Hz | 180オーム | オーガーオン | はい |
| 1035022 | 16〜100cm (6.3 ~ 39.4 インチ) |
該当なし | レシオメトリック 1.5~8.5Vdc |
DC | 1000オーム | 遠距離ターゲットボリュームを送信tage (オーガーオン) | いいえ |
| 1035023 | 20〜91cm (8.0 ~ 36.0 インチ) |
該当なし | レシオメトリック ローサイドスイッチング |
5000Hz | 250オーム | オーガーオン | いいえ |
| 1035024 | 29〜100cm (11.5 ~ 39.5 インチ) |
4 cm(1.6インチ) | ON/OFFハイサイドスイッチング | オン/オフ | 0オーム | オーガーオン | はい |
| 1035025 | 29〜100cm (11.5 ~ 39.5 インチ) |
4 cm(1.6インチ) | ON/OFF ハイサイドスイッチング(反転) | オン/オフ | 0オーム | オーガーオン | いいえ |
| 1035026 | 29〜100cm (11.5 ~ 39.5 インチ) |
20 cm(8.0インチ) | 比例PWMハイサイドスイッチング | 1000Hz | 25オーム (0~240mAに 20オーム@12Vdc、 80オーム@24Vdc) |
オーガーオン | はい |
| 1035028 | 16〜100cm (6.3 ~ 39.4 インチ) |
該当なし | レシオメトリック 0.5~4.5Vdc |
DC | 1000オーム | ターゲットボリュームに近いものを送信tage (オーガーOFF) | いいえ |
| 1035029 | 29〜100cm (11.5 ~ 39.5 インチ) |
30 cm(11.8インチ) | 比例PWMハイサイドスイッチング | 1000Hz | 0オーム | オーガーオン | はい |
| 1035030 | 29〜100cm (11.5 ~ 39.5 インチ) |
20 cm(8.0インチ) | 比例PWMハイサイドスイッチング | 1000Hz | 0オーム | オーガーオン | はい |
| 1035035 | 16〜100cm (6.3 ~ 39.4 インチ) |
該当なし | レシオメトリック 1.5~8.5Vdc |
DC | 1000オーム | 遠距離ターゲットボリュームを送信tage (オーガーオン) | いいえ |
| 1035036 | 20〜100cm (7.9 ~ 39.4 インチ) |
25 cm(9.8インチ) | 比例PWMハイサイドスイッチング | 1000 Hz 12% 最小デューティ サイクル (98% 最大) | 0オーム | オーガーオン | はい |
| 1035040 | 16〜100cm (6.3 ~ 39.4 インチ) |
該当なし | レシオメトリック 0.5~4.5Vdc |
DC | 1000オーム | 遠距離ターゲットボリュームを送信tage (オーガーオン) | いいえ |
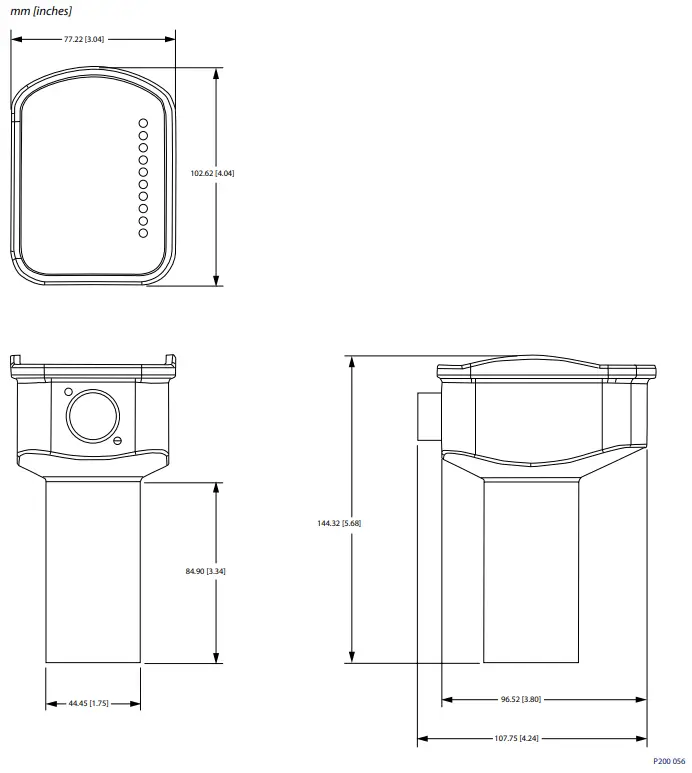
寸法
mm [インチ]
手術
動作設定
- 両方のドーム スイッチを同時に押すと、材料の最高レベルが現在の高さに設定されます (設定ポイントが確立されます)。
- ドーム スイッチを押すたびに、材料の高さが約 0.5 cm (0.2 インチ) 変化します。
- 増加ボタンまたは減少ボタンを押すと、作業領域内の固定制御バンドが移動します。
- PWM 出力は制御帯域全体で 0% から 100% まで直線的です。
- ターゲットが失われたり範囲外になったりすると、デバイスは LED バーグラフの 3 つの LED を上下にスクロールします。
- コントローラーの場合、LED バーグラフに設定ポイントが表示されます。
- センサーの場合、LED バーグラフに材料の高さが表示されます。
- ポテンショメータが接続されている場合、ポテンショメータはプッシュボタン スイッチよりも優先され、プッシュボタン スイッチは無効になります。ただし、プッシュボタン スイッチを使用して手動テストに入ることは可能です。
- 最新の設定値はメモリに保存され、電源が失われた場合でも保存され、電源が再投入されたときに復元されます。
手動機能テスト(コントローラーのみ)
超音波コントローラ/センサーには、デバイスの動作に疑わしい点がある場合にいつでも手動テストを実行するための常駐ソフトウェアが搭載されています。
手動テストモードに入る
- テスト モードに入るには、両方のメンブレン スイッチ ボタン (増加ボタンと減少ボタン) を同時に押します。
- 減少ボタン (-) を押したまま、増加ボタン (+) を放します。
- 次に、増加ボタン (+) をさらに 10 回押し、減少ボタン (-) を押し続けます。このシーケンスが正常に完了すると、トランスデューサーは超音波バーストの送信を停止し、LED バー グラフの XNUMX 個の LED がバー グラフの端から中央に向かって動き始める動作パターンを開始します。これは、手動テスト モードに正常に入ったことを示す信号です。
テスト モードに入ると、メンブレン スイッチが正常に動作しました。テスト モードに入る手順、および手動テスト内を移動するためにボタンを押す手順は、メンブレン スイッチ テストとして機能します。
5つの手動テストを実行する
手動テストtaging
- 両方のプッシュボタンスイッチを放します。
これで手動テストの最初のステップに進みました。tag点滅する LED ディスプレイのシーケンスによって認識できるステップ。 - オプション: 次のテストを実行するには、減少ボタンを 1 回押します。
- オプション: 以前のテストを実行するには、増加ボタンを 1 回押します。
増加ボタンと減少ボタンを同時に押して、最初のテスト、最後のテストに移動し、また戻ります。
EEPROMメモリテスト
このテストを実行するには、減少ボタンを 1 回押して放します。マイクロ コントローラは EEPROM テストを自動的に実行します。
テストが正常に完了すると、すべての LED が点灯します。テストが失敗すると、すべての LED が点滅します。
LED が点滅する場合は、1 つ以上の EEPROM の場所を再プログラムできません。
増加ボタンを押して放すと、LED テストが再実行されます。
LEDテスト
- 次のテストを開始するには、減少ボタンを 1 回押して放します。
このテストに入ると、各 LED が順番にオンになり、その後オフになります。 - オペレーターは、棒グラフ内の各 LED が機能していることを確認する必要があります。2 つの LED が同時にオンになってはなりません。
増加ボタンを押して放すと、EEPROM メモリ テストが再実行されます。
ポテンショメータ/LEDテスト
このテストを開始するには、減少ボタンを 1 回押して放します。
デバイスにポテンショメータを装備できる場合は、ポテンショメータを回すとディスプレイのライトが変わります。ポテンショメータの接続方法に応じて、ポテンショメータを一方向に完全に回すとすべての LED がオンになります。反対方向に完全に回すと、LED 0 (LED バー グラフの最も重要でない LED) を除くすべての LED がオフになります。このテスト中、LED 0 は常にオンになります。
LED バーグラフの長さが長くなると、PWM 接続からの出力も増加します。
ポテンショメータが接続されていない場合は、任意の LED ディスプレイとともに任意の出力が生成されます。
![]() 注意
注意
舗装機のオーガーが自動モードに設定されている場合、このテストを実行するとオーガーが回転します。
増加ボタンを押して放すと、ポテンショメータ/LED テストが再実行されます。
超音波トランシーバー/LED/出力ドライバーテスト
このテストに入るには、減少ボタンを 1 回押して放します。
超音波トランスデューサーが起動し、信号の送信とエコーの受信を開始します。
このテストを完了するには、トランスデューサーを適切なターゲットに向ける必要があります。また、バルブ ドライバーからの PWM 出力を測定する適切な方法も必要です。
デバイスがターゲットに向かって移動すると、デバイスの構成に応じて、PWM 出力は最小デューティ サイクルまたは最大デューティ サイクルになります。
デバイスがターゲットから遠ざかると、PWM 出力はデバイスの構成に応じて最大デューティ サイクルまたは最小デューティ サイクルになります。デバイスがターゲットから遠ざかると、LED ディスプレイは、アレイ内の最下位の LED を除くすべての LED がオンからオフに変わります。このテスト中、LED 0 は常にオンです。
![]() 注意
注意
舗装機のオーガーが自動モードに設定されている場合、このテストを実行するとオーガーが回転します。
増加ボタンを押して放すと、超音波トランシーバー/LED/出力ドライバー テストが再実行されます。
手動テストモードを終了
減少ボタンを 1 回押して放すと、超音波コントローラ/センサーがこのテストを開始できるようになります。
このテストは、トランスデューサーと LED バー グラフを観察することで確認できます。トランスデューサーは送信を停止し、LED バー グラフ内の 10 個の LED がバー グラフの端から中央に向かって動き始める動作パターンを開始します。
手動テスト モードを終了するには、増加ボタンを押して放すと再実行されます。
増加ボタンと減少ボタンを同時に押すと、手動テスト モードが終了し、通常の操作が再開されます。
システム図

システム図
制御図
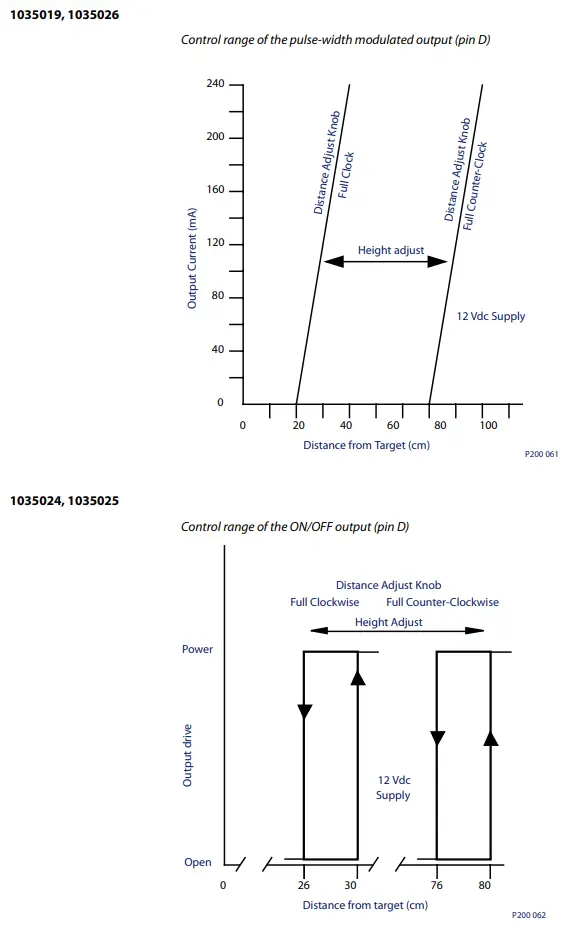
制御図
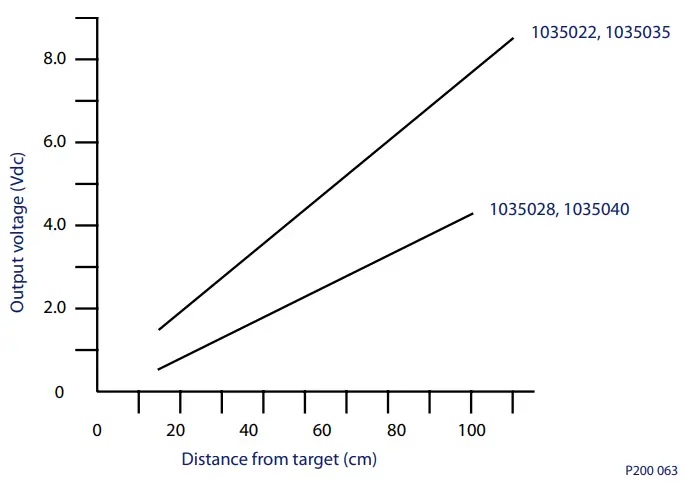
1035022、1035028、1035035、1035040
103522、1035028超音波制御/センサーのアナログ出力(ピンB)の制御範囲。電源電圧tage は 12 または 24 Vdc で、出力インピーダンスは 1 k オームです。
私たちが提供する製品:
- 屈曲軸モーター
- 閉回路アキシャルピストンポンプおよびモーター
- ディスプレイ
- 電動油圧式パワーステアリング
- 電気油圧装置
- 油圧パワーステアリング
- 統合システム
- ジョイスティックとコントロールハンドル
- マイクロコントローラーとソフトウェア
- 開回路アキシャルピストンポンプ
- 軌道モーター
- PLUS+1®ガイド
- 比例弁
- センサー
- 操舵
- トランジットミキサードライブ
ダンフォスパワーソリューションズ は、高品質の油圧および電子部品を製造する世界的なメーカーおよびサプライヤーです。当社は、オフロード移動車両市場の過酷な動作条件で優れた性能を発揮する最先端の技術とソリューションの提供を専門としています。当社は、幅広いアプリケーションに関する専門知識を基に、お客様と緊密に連携して、幅広いオフロード車両で優れた性能を発揮できるように努めています。
当社は、世界中の OEM がシステム開発を加速し、コストを削減し、車両をより早く市場に投入できるよう支援します。
Danfoss – 移動式油圧の最強のパートナー。
へ移動 www.powersolutions.danfoss.com 詳しい製品情報についてはこちらをご覧ください。
オフハイウェイ車両が活躍する場所ならどこでも、ダンフォスも活躍します。当社はお客様に世界中で専門家によるサポートを提供し、卓越したパフォーマンスを実現する最善のソリューションを保証します。また、グローバル サービス パートナーの広範なネットワークにより、すべてのコンポーネントに対して包括的なグローバル サービスも提供します。
最寄りのダンフォス パワー ソリューション担当者にお問い合わせください。
コマトロール
ホームページ
シュヴァルツミュラーインバーター
www.schwarzmuellerinverter.com
ツローラ
ホームページ
ハイドロギア
www.ハイドロギア.com
ダイキンザウアーダンフォス
www.daikin-sauer-danfoss.com
現地住所:
ダンフォス
パワーソリューションズ(米国)社
2800 イースト 13 番街
エイムズ、IA 50010、米国
電話: +1 515 239 6000
ダンフォス
Power Solutions GmbH & Co. OHG
クロクamp 35
D-24539 ドイツ、ノイミュンスター
電話: +49 4321 871 0
ダンフォス
Power Solutions GmbH & Co. OHG
クロクamp 35
D-24539 ドイツ、ノイミュンスター
電話: +49 4321 871 0
ダンフォス
パワーソリューショントレーディング(上海)有限公司
ビル 22 号、金海路 1000 号
浦東新区金橋
上海、中国201206
電話: +86 21 3418 5200
Danfoss は、カタログ、パンフレット、その他の印刷物に誤りがあった場合、一切の責任を負いません。Danfoss は、予告なしに製品を変更する権利を留保します。これは、すでに合意されている仕様に変更を加えることなく変更できる場合に限り、すでに注文されている製品にも適用されます。この資料のすべての商標は、それぞれの会社の所有物です。Danfoss および Danfoss のロゴタイプは、Danfoss A/S の商標です。無断複写・転載を禁じます。
L1009343 改訂 0401 2015 年 XNUMX 月
www.ダンフォス.com
© Danfoss A/S、2015
ドキュメント / リソース
 |
ダンフォス ソニックフィーダー 超音波コントローラー、センサー [pdf] 取扱説明書 1035019、1035026、1035029、1035036、1035024、1035022、1035028、1035040、1035035、1035023、ソニックフィーダー超音波コントローラーセンサー、ソニックフィーダー、ソニック、フィーダー、超音波コントローラーセンサー、超音波コントローラー、超音波センサー |